































Abderahman Rejeb a , Алиризо Абдуллоҳи b , Karim Rejeb c , Horst Treiblmaier d,
- a Кафедраи менеҷмент ва ҳуқуқ, факултети иқтисод, Донишгоҳи Рим Тор Вергата, Виа Колумбия, 2, Рим 00133, Италия
- b Шӯъбаи идоракунии соҳибкорӣ, факултаи менеҷменти Донишгоҳи Харазмӣ, 1599964511 Теҳрон, Эрон
- c Faculty of Sciences of Bizerte, University of Carthage, Zarzouna, 7021 Bizerte, Tunisia
- d School of International Management, Modul University Vienna, Am Kahlenberg 1, 1190 Vienna, Austria
| МАЪЛУМОТ ДАР БОРАИ | Абдуқаюми Қаюмзод |
| Калидвожаҳои: Drones УАВ Кишоварзии дақиқ Интернети чизҳо Bibliometrics | Дронҳо, ки онро мошинҳои бесарнишин (UAV) низ меноманд, дар даҳсолаҳои охир шоҳиди рушди назаррас буданд. Дар соҳаи кишоварзӣ, онҳо таҷрибаҳои кишоварзиро тағир дода, ба деҳқонон сарфаи назарраси хароҷотро пешниҳод карданд, operational efficiency, and better profitability. Over the past decades, the topic of agricultural drones has attracted remarkable academic attention. We therefore conduct a comprehensive review based on bibliometrics ҷамъбаст ва сохтори адабиёти мавҷудаи академӣ ва ошкор намудани тамоюлҳои тадқиқоти ҷорӣ ва нуқтаҳои доғ. Мо apply bibliometric techniques and analyze the literature surrounding agricultural drones to summarize and assess previous research. Our analysis indicates that remote sensing, precision agriculture, deep learning, machine learning, and the Internet of Things are critical topics related to agricultural drones. The co-citation analysis reveals six broad research clusters in the literature. This study is one of the first attempts to summarize drone research in agriculture and suggest future research directions. |
Муқаддима
Agriculture represents the primary food source of the world (Friha et al., 2021), and it has been facing severe challenges due to the
афзоиши талабот ба маҳсулоти хӯрокворӣ, амнияти озуқаворӣ ва нигарониҳои амниятӣ, инчунин даъватҳо барои ҳифзи муҳити зист, ҳифзи об ва
устуворӣ (Inoue, 2020). Пешгӯӣ мешавад, ки ин рушд идома хоҳад ёфт, зеро шумораи аҳолии ҷаҳон то соли 9.7 ба 2050 миллиард нафар мерасад.
(2019). Азбаски соҳаи кишоварзӣ намунаи барҷастатарини истеъмоли об дар саросари ҷаҳон мебошад, интизор меравад, ки талабот ба ғизо ва об
истеъмол дар ояндаи наздик хеле зиёд мешавад. Илова бар ин, афзоиши истеъмоли нуриҳо ва пестисидҳо
coupled with the intensification of farming activities could lead to future environmental challenges. Similarly, arable land is limited, and the
дар тамоми чахон шумораи дехконон кам шуда истодааст. Ин мушкилот зарурати ҳалли инноватсионӣ ва устувори кишоварзиро таъкид мекунанд (Илёс
et al., 2018; Friha et al., 2021; Inoue, 2020; Tzounis et al., 2017).
Ворид намудани технологияҳои нав ҳамчун роҳи ҳалли умедбахш барои ҳалли ин мушкилот муайян карда шудааст. Хоҷагии интеллектуалӣ (Брюстер ва дигарон,
2017; Tang et al., 2021) and precision agriculture (Feng et al., 2019; Khanna & Kaur, 2019) have emerged as a result of such debates. The
якум мафҳуми умумӣ барои қабули технологияҳои коммуникатсионӣ (ТИК) ва дигар навовариҳои пешрафта дар фаъолияти хоҷагидорӣ барои баланд бардоштани самаранокӣ ва самаранокӣ мебошад (Haque et al., 2021). Охирин ба идоракунии мушаххаси макон, ки замин ба он тақсим карда мешавад, тамаркуз мекунад
homogeneous parts, and each part gets the exact amount of agricultural input for crop yield optimization by means of novel technologies (Feng et al., 2019; Khanna & Kaur, 2019). Prominent technologies that have attracted scholars’ attention in this field include Wireless Sensor Networks (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), the Internet of Things (IoT) (Gill et al., 2017; He et al., 2021; Liu et al., 2019),
Усулҳои зеҳни сунъӣ (AI), аз ҷумла омӯзиши мошинсозӣ ва омӯзиши амиқ (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019), computing technologies (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), big data (Gill et al., 2017; Tantalaki
ва дигарон, 2019) ва blockchain (PW Khan et al., 2020; Pincheira et al., 2021).
Илова ба технологияҳои дар боло зикршуда, зондкунии фосилавӣ як воситаи технологии дорои потенсиали баланди такмилдиҳӣ ба ҳисоб меравад
кишоварзӣ оқилона ва дақиқ. Моҳвораҳо, ҳавопаймоҳои экипажи инсонӣ ва дронҳо технологияҳои маъмули ташхиси фосилавӣ мебошанд (Tsouros et al., 2019).
Drones, popularly known as Unmanned Aerial Vehicles (UAVs), Unmanned Aircraft Systems (UAS), and remotely piloted aircraft, are of
great importance as they have multiple advantages in comparison with other remote-sensing technologies. For example, drones can deliver
тасвирҳои баландсифат ва ҳалли баланд дар рӯзҳои абрнок (Manfreda et al., 2018). Инчунин, мавҷудият ва суръати интиқоли онҳо дигар аст
benefits (Radoglou-Grammatikis et al., 2020). Compared with aircraft, drones are highly cost-efficient and easy to set up and maintain (Tsouros et al., 2019). Despite being initially mainly used for military purposes, drones can benefit numerous civilian applications, for example in supply chain management (A. Rejeb, Rejeb, et al., 2021a), for humanitarian purposes (A. Rejeb, Rejeb, et al., 2021c), smart agriculture, surveying and mapping, cultural heritage documentation, disaster management, and forest and wildlife conservation (Panday, Pratihast, et al., 2020). In agriculture, manifold application areas of drones exist as they can be integrated with novel technologies, computing capabilities, and onboard sensors to support crop management (e.g., mapping, monitoring, irrigation, plant diagnosis) (H. Huang et al., 2021), disaster reduction, early warning systems, wildlife and forestry conservation to name a few (Negash et al., 2019). Similarly, drones could be leveraged in several agricultural activities, including crop and growth monitoring, yield estimation, water stress assessment, and weeds, pest, and disease detection (Inoue, 2020; Panday, Pratihast, et al., 2020). Not only can drones be used for monitoring, estimation, and detection purposes based on their sensory data, but also for precision irrigation and precision weed, pest, and disease management. In other words, drones are able to spray water and pesticides in precise amounts based on environmental data. The benefits of drones in agriculture are summarized in Table 1.
Main benefits of drones in agriculture.
| Фоида | Истинод(ҳо) |
| Беҳтар кардани вақт ва фазоӣ sensing resolutions | (Гаго ва дигарон, 2015; Ниу ва дигарон, 2020; Сривастава ва дигарон, 2020) |
| Ба хочагии кишлоки аник мусоидат кунед | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang ва дигарон, 2017) |
| Classification and scouting of зироатҳо | (Инуэ, 2020; Калищук ва дигарон, 2019; Лопес- ' Гранадос ва дигарон, 2016; Maimaitijiang ва дигарон, 2017; Мелвилл ва дигарон, 2019; Мохарана ва Дутта, 2016) |
| Usage of fertilizer | (Л. Денг ва дигарон, 2018; Гуан ва дигарон, 2019) |
| Monitoring of drought | (Фавсетт ва дигарон, 2020; Panday, Pratihast, et al., 2020; Су ва дигарон, 2018) |
| Biomass estimation | (Бендиг ва дигарон, 2014) |
| Yield estimation | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao ва дигарон, 2020) |
| Disaster reduction | (Negash et al., 2019) |
| Conservation of wildlife and ҷангал | (Negash et al., 2019; Panday, Pratihast, et al., 2020) |
| Assessment of water stress | (Инуэ, 2020; Ҷ. Су, Кумбс, ва дигарон, 2018; Л. Zhang et al., 2019) |
| Pest, weeds, and disease ошкор кардан | (Гаспарович ва дигарон, 2020; Иноуэ, 2020; Ҷ. Су, Лю, ва дигарон, 2018; X. Чжан ва дигарон, 2019) |
On the other hand, drones face limitations as well. Pilot involvement, engine power, stability and reliability, sensors’ quality due to payload
маҳдудиятҳои вазн, хароҷоти татбиқ ва танзими авиатсия, аз ҷумлаи онҳост (C. Zhang & Kovacs, 2012). Камбудихоро мукоиса мекунем
аз се технологияи сайёри зеҳнии фосилавӣ дар ҷадвали 2. Дигар технологияҳои зондкунии фосилавӣ, ба монанди сенсорҳои хок, аз доираи таваҷҷӯҳи ин тадқиқот берунанд.
Shortcomings of various mobile remote sensing technologies.
| Санҷиши дурдаст технологияҳои | Мушкилот | Адабиёт |
| Дрон (дрон) | Иштироки пилотҳо; тасвирҳо' сифат (миёна); хароҷоти амалӣ (миёна); устуворй, кобилиятнокй ва reliability; standardization; engine power; limited power манбаъҳо (дарозии батарея); мухлати махдуди парвоз, бархурд and cyberattacks; limited payload weight; large datasets and limited data processing capabilities; lack of regulation; lack of expertise, high entry barriers to the access to agricultural drones; | (Bacco et al., 2018; Dawaliby et al., 2020; Hardin & Хардин, 2010; Хардин & Ҷенсен, 2011; Лагкас ва дигарон, 2018; Лалиберте ва дигарон, 2007; Лалиберте ва Ранго, 2011; Manfreda et al., 2018, 2018; Небикер ва дигарон, 2008; Пури et al., 2017; Velusamy et al., 2022; C. Zhang & Kovacs, 2012) |
| моҳвора | Фарогирии моҳвораӣ, ҳалли маҳдуди спектр; vulnerability to visibility issues (масалан, абрҳо); Дастнорасӣ ва суръати пасти интиқол; orientation and vignetting ба маълумоти фазоии гаронбаҳо таъсир мерасонад collection; slow data delivery вақти корбарони ниҳоӣ | (Aboutalebi et al., 2019; Cen et al., 2019; Chen et al., 2019; Nansen & Elliott, 2016; Пандай, Пратихаст, et al., 2020; Sai Vineeth ва дигарон, 2019) |
| ҳавопаймо | High adoption costs; танзими мураккаб; хароҷоти нигоҳдорӣ; unavailability of reliable airplanes, geometry of the images; non-regular data acquisition; lack of flexibility; садамаҳои марговар; маълумоти сенсор тағирот аз сабаби ларзишҳо; georeferencing issues | (Armstrong et al., 2011; Atkinson et al., 2018; Barbedo & Koenigkan, 2018; Ковалев ва Ворошилова, 2020; Суомалайнен ва дигарон, 2013; Thamm et al., 2013) |
Ҳамчун технологияи бисёрсоҳавӣ ва бисёрмақсаднок дар соҳаи кишоварзӣ, дронҳо аз нуқтаи назари гуногун таҳқиқ карда шуданд. Масалан, олимон барномаҳои бесарнишинро дар соҳаи кишоварзӣ (Kulbacki et al., 2018; Mogili & Deepak, 2018), саҳми онҳо ба кишоварзии дақиқ (Puri et al., 2017; Tsuros et al., 2019), мукаммалии онҳоро бо дигар технологияҳои муосир (Ал-Тани ва дигарон, 2020; Дутта ва Митра, 2021; Найяр ва дигарон, 2020; Саха ва дигарон, 2018) ва имкониятҳои пешрафти қобилиятҳои навигатсионӣ ва ҳассосии онҳо (Барет ва дигарон. , 2015; Suomalainen et al., 2014). Азбаски тадқиқот оид ба барномаҳои бесарнишин дар соҳаи кишоварзӣ паҳн шудааст (Хан ва дигарон, 2021)), зарурати ҷамъбасти адабиёти мавҷуда ва ошкор кардани сохтори зеҳнии домен вуҷуд дорад. Ғайр аз он, ҳамчун як соҳаи баландтехнологӣ бо такмили пайваста, баррасиҳои сохторӣ бояд давра ба давра ҷамъбаст кардани адабиёти мавҷуда ва муайян кардани камбудиҳои муҳими тадқиқотӣ гузаронида шаванд. Ба
то имрӯз, чанд баррасиҳо мавҷуданд, ки барномаҳои бесарнишинро дар соҳаи кишоварзӣ баррасӣ мекунанд. Масалан, Mogili and Deepak (2018) ба таври мухтасар оқибатҳои дронҳоро барои мониторинги ҳосил ва пошидани пестисидҳо баррасӣ мекунанд. Inoue (2020) баррасии истифодаи моҳвора ва бесарнишинро дар зондгирии фосилавӣ дар соҳаи кишоварзӣ анҷом медиҳад. Муаллиф мушкилоти технологии қабули хоҷагии интеллектуалӣ ва саҳми моҳвораҳо ва дронҳоро дар асоси омӯзиши мисолҳо ва таҷрибаҳои беҳтарин омӯхтааст. Цурос ва дигарон. (2019) намудҳои гуногуни дронҳо ва татбиқи асосии онҳоро дар соҳаи кишоварзӣ ҷамъбаст намуда, усулҳои гуногуни ба даст овардан ва коркарди маълумотро таъкид мекунанд. Чанде пеш Аслан ва дигарон. (2022) баррасии ҳамаҷонибаи барномаҳои UAV дар фаъолияти кишоварзӣ анҷом дод ва аҳамияти маҳаллисозӣ ва харитасозии ҳамзамон барои UAV дар гармхона таъкид кард. Диас-Гонсалес ва дигарон. (2022) тадқиқотҳои охирини истеҳсоли ҳосили зироатҳоро дар асоси усулҳои гуногуни омӯзиши мошинҳо ва дурдаст баррасӣ кардааст
системаҳои ҳассос. Бозёфтҳои онҳо нишон доданд, ки UAV барои арзёбии нишондиҳандаҳои хок муфид аст ва аз ҷиҳати ҳалли фазоӣ, муваққатии иттилоот ва чандирӣ аз системаҳои моҳвораӣ бартарӣ дорад. Басирй ва дигарон. (2022) баррасии мукаммали равишҳо ва усулҳои гуногунро барои бартараф кардани мушкилоти банақшагирии роҳ барои UAV-ҳои бисёрроторӣ дар заминаи кишоварзии дақиқ анҷом дод. Илова бар ин, Авайс ва дигарон. (2022) татбиқи маълумотҳои зеҳни фосилавии UAV-ро дар зироатҳо барои арзёбии ҳолати об ҷамъбаст кард ва синтези амиқи иқтидори эҳтимолии зеҳни фосилавии UAV-ро барои истифодаи фишори партовҳо таъмин кард. Ниҳоят, Аквилани ва дигарон. (2022) технологияҳои пешакии хоҷагии деҳқониро, ки дар системаҳои чорводории чарогоҳ истифода мешаванд, баррасӣ кард ва ба хулосае омад, ки зеҳни фосилавӣ, ки тавассути UAVs имконпазир аст, барои арзёбии биомасса ва идоракунии гала муфид аст.
Ҳамчунин, талошҳои истифодаи ҳавопаймоҳои бесарнишин дар назорат, пайгирӣ ва ҷамъоварии чорво дар вақтҳои охир гузориш шудааст.
Ҳарчанд ин баррасиҳо фаҳмишҳои нав ва муҳим медиҳанд, аммо дар адабиёт ягон баррасии ҳамаҷониба ва замонавӣ дар асоси библиометрия мавҷуд нест, ки холигии равшани донишро нишон медиҳад. Ғайр аз он, қайд карда шудааст, ки вақте ки истеҳсолоти илмӣ дар соҳаи илмӣ афзоиш меёбад, барои муҳаққиқон истифодаи равишҳои баррасии миқдорӣ барои дарки сохтори дониши домен муҳим аст (Rivera & Pizam, 2015). Ба ҳамин монанд, Феррейра ва дигарон. (2014) бар ин назар аст, ки бо камоли майл ва печида шудани соҳаҳои тадқиқот, олимон бояд гоҳ-гоҳ дарк кардани донишҳои тавлидшуда ва ҷамъшударо барои ошкор кардани саҳмҳои нав, гирифтани анъанаҳо ва тамоюлҳои тадқиқотӣ, муайян кардани кадом мавзӯъҳо омӯхта шаванд ва ба сохтори донишҳои соҳа ва самтҳои эҳтимолии тадқиқот. Ҳангоме ки Рапарелли ва Бажокко (2019) барои таҳқиқи соҳаи дониши барномаҳои бесарнишин дар соҳаи кишоварзӣ ва ҷангал таҳлили библиометрӣ анҷом доданд, омӯзиши онҳо танҳо тадқиқоти илмии дар солҳои 1995 ва 2017 нашршударо баррасӣ мекунад, ки динамикаи ин минтақаи босуръатро инъикос намекунад. Ғайр аз он, муаллифон кӯшиш накарданд, ки саҳми бонуфузтаринро дар ин соҳа муайян кунанд, адабиётро гурӯҳбандӣ кунанд ва сохтори зеҳниро бо истифода аз таҳлили иқтибосҳо арзёбӣ кунанд. Дар натиҷа, ҷамъбасти адабиёт барои ошкор кардани марказҳои тадқиқот, тамоюлҳо ва нуқтаҳои доғ зарур аст.
To fill this knowledge gap, we leverage quantitative methodology and rigorous bibliometric methods to examine the current state of research at the intersection of drones and agriculture. We argue that the current study makes several contributions to the existing literature by examining an emerging technology which is highly needed in agriculture as it provides tremendous potential to alter several aspects in this sector. The need for a bibliometric analysis of agricultural drones is sensed even more given the scattered and fragmented knowledge on drones within the agriculture context. Similarly, the literature pertaining to agricultural drones is required to be systematically clustered, considering the most influential studies which build the foundation of this research field. The merit in the analysis also includes the clarification of main research themes represented in the literature. Considering the transformational potential of the technology, we posit that an indepth network analysis yields novel insights by determining influential works and revealing themes concerning drones’ potential for agriculture.
We therefore strive to achieve the following research objectives:
- Муайян кардани нашрияҳои бонуфуз бо саҳми барҷаста дар барномаҳои бесарнишин дар соҳаи кишоварзӣ.
- Clustering of the literature, identification of research foci, and mapping of the main ‘intellectual structure’ studies based on semantic similarity by using co-citation analysis.
- Фаҳмиши таҳаввулоти робитаҳо ва шабакаҳои истинод бо мурури замон дар байни нашрияҳои мухталиф дар ин соҳа ва муайян кардани самтҳои таҳқиқоти оянда ва мавзӯъҳои доғ.
The rest of the paper is structured as follows: section 2 outlines the methodology and data collection steps; section 3 provides the results of the analyses; and section 4 discusses the findings and concludes with research contributions, implications, and future directions.
Методология
In this current research study, we conduct a bibliometric analysis to explore drone applications in agriculture. This quantitative approach reveals the intellectual structure of the knowledge domain (Arora & Chakraborty, 2021) and the current status, hot topics, and future research directions that can be investigated by applying this method (Kapoor et al., 2018; Mishra et al., 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; M. A. Rejeb et al., 2020). Generally, a bibliometric analysis examines the extant literature to summarize and uncover hidden patterns of written communication and the evolution of the discipline based on statistics and mathematical methods, and it applies to large data sets (Pritchard, 1969; Small, 1999; Tahai & Rigsby, 1998). By using bibliometrics, we aspire to better understand the existing paradigms and research foci that contribute to the domain based on similarity (Thelwall, 2008). Bibliometrics provides new insights backed by the objective quantitative strength of the methodology (Casillas & Acedo, 2007). Numerous scholars have previously conducted bibliometric studies in related domains, including agriculture, remote sensing, and digital transformation (Armenta-Medina et al., 2020; Bouzembrak et al., 2019; A. Rejeb, Treiblmaier, et al., 2021; Wamba & Queiroz, 2021; Wang et al., 2019).
Таҳлили иқтибос
Citation analysis reveals various insights into a given research field. First of all, it helps to reveal the most influential authors and publications that contribute to a given research field and make a significant impact (Gundolf & Filser, 2013). Secondly, the knowledge flow and the communication links between authors can be uncovered. Finally, by tracing the links between cited and citing works, one can explore the changes and evolution of a knowledge domain over time (Pournader
ва дигарон, 2020). Рақамҳои баланди иқтибосҳои нашрия аҳамият ва саҳми назарраси онро ба соҳаи тадқиқот инъикос мекунанд (Балди, 1998; Гундолф ва Филсер, 2013; Маринко, 1998). Таҳлили иқтибосҳои нашрияҳо инчунин барои муайян кардани асарҳои дахлдор ва пайгирӣ кардани маъруфият ва пешрафти онҳо бо мурури замон кӯмак мекунад.
Таҳлили иқтибосҳои ҳуҷҷат
Co-citation analysis is a valuable method to explore relationships between publications and depict the intellectual structure of a field (Nerur et al., 2008). In other words, by identifying the most cited publications and their connections, the method groups publications into distinct research clusters wherein publications in a cluster regularly share similar ideas (McCain, 1990; Small, 1973). It is crucial to mention that similarity does not mean that the findings of the publications are
муттаҳид ва бо ҳамдигар мувофиқат мекунанд; нашрияҳо аз сабаби шабоҳати мавзӯъ ба як кластер тааллуқ доранд, аммо онҳо метавонанд нуқтаи назари мухолиф дошта бошанд.
Ҷамъоварии маълумот ва таҳлил
Following the methodology proposed by White and Griffith (1981), we performed a comprehensive search of journal articles to cover the entire research domain of drone applications in agriculture, pursuing the following five steps:
- Қадами аввал ҷамъоварии маълумот буд. Scopus ҳамчун яке аз пойгоҳи додаҳои ҳамаҷониба ва боэътимод бо натиҷаҳои стандартишуда интихоб карда шуд. Мета-маълумоти нашрияҳои марбут ба ҳама барномаҳои бесарнишин дар соҳаи кишоварзӣ гирифта шуданд. Сипас, мо мақолаҳои интихобшударо таҳлил карда, мақолаҳои берун аз мавзӯъро аз таҳлил хориҷ кардем.
- We analyzed the literature and identified the most important keywords used in the research area.
- Бо истифода аз таҳлили иқтибос, мо робитаи байни муаллифон ва ҳуҷҷатҳоро омӯхта, намунаҳои асосии иқтибосҳоро ошкор кардем. Мо инчунин муаллифон ва нашрияҳои бонуфузтаринро муайян кардем, ки дар соҳаи дронҳои кишоварзӣ саҳми назаррас доранд.
- We conducted a co-citation analysis to group similar publications into clusters.
- Finally, we analyzed the connections and linkages between countries, institutions, and journals to depict the collaboration network.
Identification of appropriate search terms
We applied the following search strings for data aggregation: (drone* OR “unmanned aerial vehicle” OR uav* OR “unmanned aircraf system” OR uas Ё «самолётхои ба масофаи дур идорашаванда”) ВА (кишоварзӣ Ё кишоварзӣ Ё кишоварзӣ Ё фермер). The search was conducted in September 2021. Drones have several designations, including UAV, UAS, and remotely piloted aircraft (Sah et al., 2021). The specific search terms related to agriculture were identified based on the study of Abdollahi et al. (2021). For the sake of clarity and transparency, the exact query we used is given in Appendix 1. Following a data cleaning process, we created a text file that was subsequently loaded into BibExcel, a common tool for citation and co-citation analysis. This tool also offers simple interaction with other software and offers a significant degree of freedom in data handling and analysis. VOSviewer version 1.6.16 was used to visualize the findings and generate the bibliometric networks (Eck & Waltman, 2009). VOSviewer offers a range of intuitive visualization, particularly for analyzing bibliometric maps (Geng et al., 2020). Furthermore, it assists in providing plain visual results that aid in better understanding the results (Abdollahi et al., 2021). Applying the search strings as stated above, we gathered and stored all relevant publications. The first search results yielded a total of 5,085 documents. To ensure the quality of the selected sample, only peer-reviewed journal articles were considered in the research, resulting in the exclusion of other document types, such as books, chapters, conference proceedings, and editorial notes. During a screening process, irrelevant (i.e., beyond the scope of this work), redundant (i.e., duplicates originating from double indexing), and non-English-speaking publications were filtered out. This process resulted in the inclusion of 4,700 documents in the final analysis.
Findings and discussion
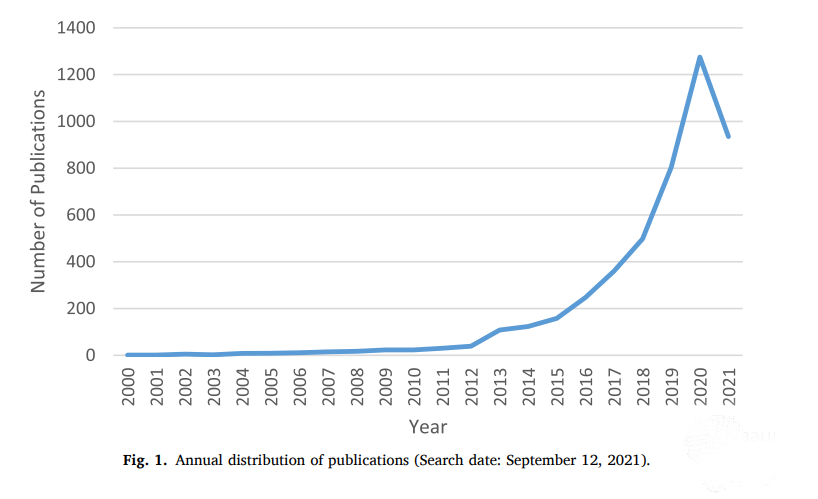
To start, we analyzed the developments in publication output in the current literature on agricultural drones. The temporal distribution of scholarly research is shown in Fig. 1. We see a rapid increase in publications from the year 2011 (30 publications) onward; therefore, we decided to split the analysis period into two different stages. We refer to the period between 1990 and 2010 as the build-up stage, which had roughly seven papers published annually. The post-2010 period has been called the growth stage since research on drone applications in agriculture witnessed an exponential surge during this period. After 2010, the increasing number of publications confirms the growing interest among researchers, which also reflects that drones have been applied to remote sensing and used in precision agriculture (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020). Specifically, the number of publications rose from 108 in 2013 to 498 in 2018 and peaked at 1,275 in 2020. A total of 935 articles were published between January and mid-September 2021. Subsequently, we opted to focus our analysis more on the growth stage since this period reflects the most recent and important subtleties of agricultural drones.
Таҳлили калимаҳои калидӣ
Калидвожаҳое, ки муаллифон барои интишор интихоб мекунанд, ба чӣ гуна муаррифии коғаз ва тарзи иртибот дар байни ҷомеаҳои илмӣ таъсири ҳалкунанда доранд. Онҳо мавзӯъҳои асосии тадқиқотро муайян мекунанд ва потенсиали онро барои шукуфоӣ ё нокомӣ муайян мекунанд (Day & Gastel, 1998.; Ким ва дигарон, 2016; Уддин ва дигарон, 2015). Таҳлили калимаҳои калидӣ, як воситаи ошкор кардани тамоюлҳо ва самтҳои тадқиқоти васеътар, ба ҷамъоварии калимаҳои калидии ҳама нашрияҳои марбут дар домен ишора мекунад (Dixit & Jakhar, 2021). Дар таҳқиқоти ҷорӣ мо калимаҳои калидии ҷамъшударо ба ду маҷмӯа тақсим кардем (яъне то солҳои 2010 ва 2011–2021) барои омӯхтани мавзӯъҳои маъмултарин. Бо ин кор, мо метавонем калимаҳои муҳимро дар ҳарду маҷмӯа пайгирӣ кунем ва итминон диҳем, ки ҳамаи маълумоти заруриро гирифтаем. Барои ҳар як маҷмӯа даҳ калимаҳои калидӣ дар ҷадвали 3 оварда шудаанд. Мо номувофиқатиро бо роҳи якҷоя кардани калимаҳои аз ҷиҳати семантикӣ якхела, аз қабили “дрон” ва “дрон” ё ба ҳамин монанд, “Интернети ашё” ва “IoT” бартараф кардем.
Ҷадвали 3 нишон медиҳад, ки "ҳавопаймоҳои бесарнишин" дар муқоиса бо "дрон" ва "системаи ҳавопаймоии бесарнишин" дар ҳарду давра калимаи бештар истифода мешавад. Инчунин, дар ҳарду давра "санҷишҳои дурдаст", "қишлоқи дақиқ" ва "кишоварзӣ" баҳои баланд доранд. Дар давраи аввал, "кишоварзӣ дақиқ" дар ҷои панҷум ва дар давраи дуюм ҷои дуюмро ишғол карданд, ки нишон медиҳад, ки дронҳо дар ноил шудан ба кишоварзии дақиқ аҳамияти бештар пайдо мекунанд, зеро онҳо метавонанд мониторингро анҷом диҳанд,
detection, and estimation practices faster, cheaper, and easier to perform in comparison with other remote-sensing and ground-based systems. Also, they can spray the precise amount of input (e.g., water or pesticides) when needed (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
List of most frequently used keywords.
рутба | 1990-2010 | № ҳодисаҳо | 2011-2021 | № ҳодисаҳо |
| 1 | ҳавопаймои бесарнишин мошин | 28 | бесавод мошини ҳавоӣ | 1628 |
| 2 | ҳисси дурдаст | 7 | дақиқ кишоварзӣ | 489 |
| 3 | кишоварзӣ | 4 | ҳисси дурдаст | 399 |
| 4 | ҳавоӣ | 4 | бесарнишини | 374 |
| 5 | дақиқ кишоварзӣ | 4 | бесавод aerial system | 271 |
| 6 | ҳавопаймои бесарнишин | 4 | кишоварзӣ | 177 |
| 7 | гиперспектрал санҷандаро | 3 | омӯзиши чуқур | 151 |
| 8 | асаби сунъӣ шабакаҳо | 2 | машина омӯзиш | 149 |
| 9 | autonomous fligh | 2 | растанӣ Индекс | 142 |
| 10 | қаҳва | 2 | Интернет аз чи | 124 |
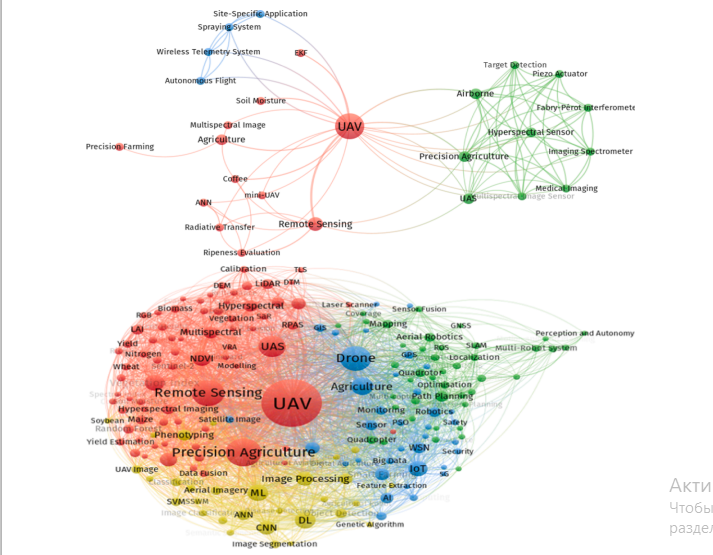
Another interesting feature is the presence of complementary technologies. In the first stage, “Hyperspectral Sensor” and “artificial neural networks” (ANN) are among the top ten keywords. Hyperspectral imaging revolutionized traditional imaging by collecting a huge number of images at various wavelengths. In doing so, the sensors can simultaneously collect better spatial and spectral information as compared to multispectral imaging, spectroscopy, and RGB imagery (Adao ˜ et al.,
2017). Пайдо шудани “ANN” дар марҳилаи аввал ва “омӯзиши амиқ” (DL) ва “омӯзиши мошинсозӣ” (ML) дар марҳилаи дуввум маънои онро дорад, ки аксари корҳои нашршуда ба баррасии потенсиали усулҳои AI барои ҳавопаймоҳои бесарнишин нигаронида шудаанд. хочагии кишлок асос ёфтааст. Ҳарчанд дронҳо қодиранд мустақилона парвоз кунанд, онҳо то ҳол ҷалби халабонро талаб мекунанд, ки сатҳи пасти иктишофии дастгоҳро дар назар дорад. Аммо, ин мушкилотро метавон аз ҳисоби пешрафти усулҳои AI ҳал кард, ки метавонад огоҳии беҳтари вазъият ва дастгирии мустақилонаи тасмимҳоро таъмин кунад. Дронҳо, ки бо AI муҷаҳҳаз шудаанд, метавонанд ҳангоми паймоиш аз бархӯрд пешгирӣ кунанд, идоракунии хок ва зироатҳоро беҳтар созанд (Inoue, 2020) ва меҳнат ва стрессро барои одамон коҳиш диҳанд (BK Sharma et al., 2019).
Бо сабаби чандирӣ ва қобилияти коркарди миқдори зиёди маълумоти ғайрихаттӣ, усулҳои AI усулҳои мувофиқ барои таҳлили додаҳои тавассути дронҳо ва дигар системаҳои дурдаст ва заминӣ барои пешгӯӣ ва қабули қарорҳо мебошанд (Алӣ ва дигарон, 2015; Инуэ, 2020). Ғайр аз он, мавҷудияти "IoT" дар давраи дуюм аз нақши пайдоиши он дар соҳаи кишоварзӣ шаҳодат медиҳад. IoT тавассути пайваст кардани технологияҳои дигар, аз ҷумла дронҳо, ML, DL, WSNҳо ва додаҳои калон дар соҳаи кишоварзӣ инқилоб мекунад. Яке аз бартариҳои калидии татбиқи IoT қобилияти он барои муттаҳид кардани вазифаҳои гуногун (ҷамъоварии маълумот, таҳлил ва коркарди маълумот, қабули қарор ва татбиқ) дар вақти наздики воқеӣ мебошад (Elijah et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019). Ғайр аз он, дронҳо воситаи муассир барои гирифтани маълумоти зарурӣ барои ҳисоб кардани қувват ва хосиятҳои растаниҳои растанӣ ҳисобида мешаванд (Кандиаго ва дигарон, 2015). Расми 2а ва 2б шабакаҳои вожаи муштаракро барои ҳарду давраи вақт тасвир мекунанд.
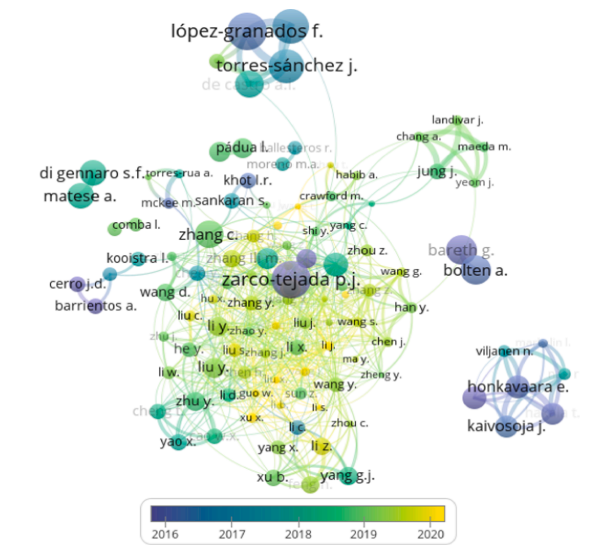
Influential authors
In this section, we determine the influential authors and examine how author citation networks can visualize and organize the current literature. Fig. 3 shows the chronological overlay of all researchers with the highest number of citations. The color scale reflects the year-wise variation of authors’ citations. We examine the citation structure of researchers who published studies on agricultural drones by using a threshold of a minimum of 50 citations and ten publications. Out of
12,891 authors, only 115 met this condition. Table 4 lists the top ten influential authors, sorted by the maximum number of citations. Lopez- Granados F. leads the list with 1,963 citations, followed by Zarco-Tejada P.J. with 1,909 citations.
Рӯйхати муаллифони бештар истинодшуда.
| воломақоми | муаллиф | Шаҳрҳо |
| 1 | Лопес-Гранадос Ф. | 1,963 |
| 2 | Зарко-Тежада ПҶ | 1,909 |
| 3 | Pena ˜ J.M. | 1,644 |
| 4 | Torres-S´ anchez J. | 1,576 |
| 5 | Феререс Э | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | Bolten A | 1,160 |
| 8 | Барет Г | 1,155 |
| 9 | Берни Ҷ.А | 1,132 |
| 10 | де Кастро АИ | 1,036 |
Вақте ки сухан дар бораи нашрияҳои инфиродӣ меравад, мақолаи Чжан ва Ковачс (2012) тадқиқоти аз ҳама иқтибосшуда дар Precision Agriculture нашр шудааст. Дар ин ҷо, муаллифон татбиқи UAS-ро дар соҳаи кишоварзии дақиқ баррасӣ карданд. Бозёфтҳои тадқиқоти онҳо нишон медиҳанд, ки зарурати пешбурди тарҳрезии платформа, истеҳсол, стандартизатсияи геореференсияи тасвир ва ҷараёни ҷустуҷӯи иттилоот барои таъмини деҳқонон бо маҳсулоти боэътимоди ниҳоӣ вуҷуд дорад. Илова бар ин, онҳо тавсия медиҳанд, ки деҳқон бештар ҷалб карда шаванд, махсусан дар банақшагирии саҳро, гирифтани тасвир, инчунин тафсир ва таҳлили маълумот. Муҳим он аст, ки ин тадқиқот яке аз аввалинҳо буд, ки аҳамияти UAV-ро дар харитасозии саҳроҳо, харитасозии қувват, андозагирии таркиби кимиёвӣ, мониторинги фишори растанӣ ва арзёбии таъсири нуриҳо ба афзоиши растаниҳо нишон дод. Мушкилоти марбут ба технология инчунин хароҷоти мамнӯъ, қобилияти сенсорӣ, устуворӣ ва эътимоднокии платформа, набудани стандартизатсия ва тартиби пайвастаи таҳлили миқдори зиёди маълумотро дар бар мегиранд.
Таҳлили иқтибос
Тањлили иќтибосњо омўзиши таъсири маќолањоро ифода мекунад, гарчанде ки ба љараён моил бошад (масалан, иќтибос бо худшиносї) яке аз воситањои стандартии арзёбии таъсир ба њисоб меравад (Осаре, 1996; А. Режеб ва диг., 2022; Сарли ва дигарон, 2010). Иқтибосҳо инчунин аҳамият ва ҳаётбахшии саҳми мақолаҳоро дар адабиёт дар мавзӯи мушаххас инъикос мекунанд (Р. Шарма ва дигарон, 2022). Мо таҳлили иқтибосҳоро барои муайян кардани тадқиқоти таъсирбахш дар бораи дронҳои кишоварзӣ анҷом додем ва мундариҷаро ҷамъбаст кардем. Дар ҷадвали 5 рӯйхати понздаҳ ҳуҷҷати бонуфузтарин барои солҳои 1990–2010 ва 2011–2021 оварда шудааст. Мақолаҳои Берни ва дигарон. (2009)b ва Остин (2010) бештар дар давоми солҳои 1990 ва 2010 бо 831 ва 498 иқтибос оварда шудаанд. Берни ва дигарон. (2009)b потенсиали таҳияи маҳсулоти миқдорӣ аз фосилавӣ тавассути як ҳавопаймои бесарнишини чархболро, ки бо сенсорҳои дастраси гармидиҳӣ ва фарохмаҷрои мултиспектралӣ муҷаҳҳаз шудааст, нишон додааст. Дар муқоиса бо сенсорҳои анъанавии ҳавоӣ, як системаи камхарҷи UAV барои кишоварзӣ метавонад баҳодиҳии муқоисашавандаи параметрҳои биофизикии зироатҳоро, агар беҳтар набошад, ба даст орад. Хароҷоти дастрас ва чандирии амалиётӣ дар баробари қарорҳои баланди спектралӣ, фазоӣ ва муваққатӣ, ки дар вақти зуд ба даст омадаанд, UAVҳоро барои як қатор барномаҳое мувофиқ мегардонанд, ки идоракунии вақтро талаб мекунанд, аз ҷумла нақшаи обёрӣ ва кишоварзии дақиқ. Маҷалла аз Берни ва дигарон. (2009)b хеле иқтибос шудааст, зеро он платформаи боли чархдори бесарнишин ва сенсорҳои рақамӣ ва гармиро бо механизмҳои калибрченкунӣ барои барномаҳои кишоварзӣ самаранок муттаҳид кардааст. Дувумин нашрияи аз ҳама иқтибосшуда китобест, ки аз ҷониби Остин (2010) муаллифи он аст, ки UAV-ро аз нуқтаи назари тарроҳӣ, таҳия ва ҷойгиркунӣ баррасӣ кардааст. Дар соҳаи кишоварзӣ, UAVs мониторинги зироатҳоро тавассути ошкор кардани бемориҳо тавассути тағирёбии ранги зироатҳо, осон кардани кишт ва пошидани зироатҳо ва назорат ва рондани галаҳоро дастгирӣ мекунанд.
The studies of Sullivan et al. (2007), Lumme et al. (2008), and Gokto ¨ ǧan et al. (2010) finish the list of the top fifteen most cited articles. These articles illustrate the development of UAV-based systems to support agriculture. They offer solutions to various problems, such as crop monitoring and scanning, weed surveillance and management, and decision support. They also suggest and discuss UAV’s ability to increase sampling efficiency and aid farmers in devising accurate and effective
стратегияҳои ниҳолшинонӣ. Муаллифи ду мақола аз ҷониби Берни (Berni et al., 2009b; Berni et al., 2009a), ки таъсири назарраси ӯро ба тадқиқоти марбут ба бесарнишини кишоварзӣ таъкид мекунанд. Газета аз Зарко-Тежада ва дигарон. (2014) дар байни таҳқиқоти пешқадам барои нишон додани зарурати истифодаи тасвирҳои UAV-и арзон дар миқдори баландии дарахтон буд.
Рӯйхати нашрияҳои бештар истинодшуда.
| рутба | Аз 1990 ба 2010 | Аз 2011 ба 2021 | ||
| Ҳуҷҷат | Эзоҳ | Ҳуҷҷат | Эзоҳ | |
| 1 | (Berni et al., 2009b) | 831 | (C. Zhang & Kovacs, 2012) | 967 |
| 2 | (Austin, 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (Ҳант ва дигарон, 2010) | 331 | (Флореано ва Вуд, 2015) | 552 |
| 4 | (S. R. Herwitz et al., 2004) | 285 | (Hossein Motlagh et al., 2016) | 391 |
| 5 | (C. C. D. Lelong et al., 2008) | 272 | (Шахатре ва дигарон, 2019) | 383 |
| 6 | (Berni et al., 2009b) | 250 | (Ma et al., 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Бендиг ва дигарон, 2014) | 360 |
| 8 | (Hrabar et al., 2005) | 175 | (Зарко-Тежада ва дигарон, 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad˜ ao ва дигарон, 2017) | 335 |
| 10 | (Шмал III ва дигарон, 2008) | 119 | (Honkavaara et al., 2013a) | 331 |
| 11 | (Abd-Elrahman et al., 2005) | 79 | (Candiago et al., 2015) | 327 |
| 12 | (Техи ва дигарон, 2010) | 69 | (Xiang & Tian, 2011) | 307 |
| 13 | (Sullivan et al., 2007) | 51 | (Матесе ва дигарон, 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (Gago et al., 2015) | 275 |
| 15 | (Гокто ¨ ǧan ва дигарон, 2010) | 40 | (Aasen et al., 2015a) | 269 |
Дар давраи дуюм (2011–2021) тадқиқоти Чжан ва Ковач (2012) ва Некс ва Ремондино (2014) нашрияҳои бештар истинодшавандаро ба даст оварданд. Zhang and Kovacs (2012) баҳс мекунанд, ки кишоварзии дақиқ метавонад аз татбиқи усулҳои географӣ ва сенсорҳо, аз қабили системаҳои иттилоотии ҷуғрофӣ, GPS ва ташхиси фосилавӣ баҳра барад, то вариантҳоро дар саҳро сабт кунад ва онҳоро тавассути истифодаи стратегияҳои алтернативӣ идора кунад. Ҳамчун тағирдиҳандаи бозӣ дар соҳаи кишоварзии дақиқ, қабули дронҳо давраи навро дар зондгирии фосилавӣ, содда кардани мушоҳидаи ҳавоӣ, гирифтани маълумоти афзоиши ҳосил, шароити хок ва минтақаҳои дорупошӣ оғоз кард. Баррасии Чжан ва Ковач (2012) муҳим аст, зеро он дар бораи UAV-ҳо тавассути ошкор кардани истифода ва мушкилоти мавҷудаи ин дастгоҳҳо дар мониторинги муҳити зист ва кишоварзии дақиқ, аз қабили маҳдудиятҳои платформа ва камера, мушкилоти коркарди маълумот, ҷалби деҳқонон ва қоидаҳои авиатсия пешниҳод мекунад. . Дуюм
most cited study from Nex and Remondino (2014) reviewed the state of the art of UAVs for capturing, processing, and analyzing earth images.
Their work also presented an overview of several UAV platforms, applications, and use cases, showcasing the newest advancements in UAV image processing. In agriculture, farmers could use UAVs to make effective decisions to achieve cost and time savings, receive a rapid and precise record of damages, and anticipate possible problems. In contrast to conventional aerial platforms, UAVs can cut operational expenses and lessen the danger of access in harsh locations while still preserving high precision potential. Their paper summarizes various advantages of UAVs, particularly in terms of accuracy and resolution.
Among the remaining thirteen most cited publications between 2011 and 2021, we noticed a greater concentration on research connected to drone applications in imaging missions (Bendig et al., 2014; Ma et al., 2017; Zarco-Tejada et al., 2014), precision agriculture (Candiago et al., 2015; Honkavaara et al., 2013a), precision viticulture (Matese et al., 2015), water stress assessment (Gago et al., 2015), and vegetation monitoring (Aasen et al., 2015a). In the early years, researchers focused
more on developing low-cost, lightweight, and precise UAV-based systems for agriculture; more recent research has focused more on reviews of UAV applications for agriculture and field surveying. In summary, this analysis reveals that the influential publications have mostly provided reviews of prior studies to evaluate UAVs’ current scientific and technological status and developed UAV systems to support precision agriculture. Interestingly, we did not find studies that employed empirical
methodologies or descriptive case studies, which constitutes a significant knowledge gap and calls for more research on this topic.
Co-citation analysis
According to Gmür (2006), co-citation analysis identifies similar publications and clusters them. Careful examination of a cluster can reveal a common field of research among the publications. We investigate the co-citation of the literature pertaining to agricultural drones to illustrate related subject areas and detect the intellectual patterns of publications. In this regard, Small (1973) recommended the use of cocitation analysis to study the most influential and seminal research
дар доираи як фан. Барои маҳдуд кардани маҷмӯа ба мақолаҳои муҳимтарин (Гоял ва Кумар, 2021), мо ҳадди иқтибосро 25 муқаррар кардем, ки маънои онро дорад, ки ду мақола бояд дар рӯйхати истинодҳои 25 ё бештар аз нашрияҳои гуногун якҷоя оварда шуда бошанд. Кластерсозӣ инчунин бо андозаи ҳадди ақали кластер 1 ва бидуни ягон усули якҷоя кардани кластерҳои хурдтар бо кластерҳои калонтар гузаронида шуд. Дар натиҷа, дар асоси шабоҳати омӯзишҳо ва сохтори зеҳнии онҳо шаш кластер ташкил карда шуд. Ҷадвали 6 тақсимоти нашрияҳоро дар ҳар як кластер нишон медиҳад.
Cluster 1: This cluster contains eighteen documents published after The publications in this cluster discuss the role of drones in supporting environmental monitoring, crop management, and weed management. For example, Manfreda et al. (2018) provide an overview of the current research and implementations of UAV in natural agricultural ecosystem monitoring and argue that the technology offers tremendous potential to drastically enhance environmental monitoring and reduce
фосилаи мавчудаи байни мушохидахои сахрой ва му-каррарии дар хаво ва кайхонназаргузаронии фосилавй. Инро метавон тавассути пешниҳоди иқтидори нав барои ҷустуҷӯи мукаммали вақт ва фаҳмиши фазоӣ дар минтақаҳои калон бо роҳи дастрас анҷом дод. Ҳавопаймоҳои UAV метавонанд ҳамеша муҳити атрофро ҳис кунанд ва маълумоти бадастомадаро ба муассисаҳои соҳибақл, мутамарказ / ғайримарказонидашуда фиристанд, ки сенсорҳоро барои муайян кардани мушкилоти эҳтимолӣ, ба монанди набудани беморӣ ё ошкор кардани об назорат мекунанд (Падуа ´ et al., 2017). Адао ˜ ва дигарон. (2017) бар он назаранд, ки UAVs барои арзёбии шароити растаниҳо тавассути гирифтани миқдори зиёди маълумоти хоми марбут ба вазъи об, баҳодиҳии биомасса ва арзёбии қувва беҳтаринанд. Сенсорҳои бо UAV васлшаванда инчунин метавонанд фавран дар шароити дурусти муҳити зист ҷойгир карда шаванд, то ба сари вақт гирифтани маълумоти аз фосилавӣ имкон диҳанд (Вон Буерен ва дигарон, 2015). Тавассути UAV-ҳо, деҳқонон имкон доранд, ки амалан аз ҳама ҷо дар фазои сеченакаи муҳити кишоварзии дарунӣ (масалан, гармхонаҳо) ченакҳо гиранд ва ба ин васила назорати маҳаллии иқлим ва мониторинги растаниҳоро таъмин кунанд (Ролдан ' et al. ., 2015). Дар заминаи дақиқ
agriculture, crop management decisions necessitate accurate, reliable crop data with an appropriate temporal and spatial resolution (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019). For this reason, Agüera Vega et al. (2015) used a UAV-mounted multispectral sensor system to acquire images of a sunflower crop during the growing season. Similarly, Huang et al. (2009) note that remote sensing based on UAVs could facilitate the measurement of crops and soil from the collected spectral data. Verger et al. (2014) developed and tested a technique for estimating a green area index (GAI) from UAV reflectance measurements in precision agriculture applications, focusing on wheat and rapeseed crops. Therefore, drones provide new possibilities for retrieving crop state information with frequent revisits and high spatial resolution (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016).
Гурӯҳбандии нашрияҳои таъсирбахш дар дронҳои кишоварзӣ.
| Кластер | Мавзӯи васеъ | Адабиёт |
| 1 | Environmental monitoring, crop идоракунй, муборизаи алафхои бегона | (Ad˜ ao et al., 2017; Agüera Vega et al., 2015; de Castro et al., 2018; Gomez-Cand ´ on ´ et al., 2014; Y. B. Huang et al., 2013; Khanal et al., 2017; Lopez-Granados, ´ 2011; Manfreda et al., 2018; P´ adua ва дигарон, 2017; Pena ˜ et al., 2013; P´erez-Ortiz et al., 2015; Rasmussen et al., 2013, 2016; Torres-S´ Анчес ва дигарон, 2014; Торрес-Санчес, Лопес-Гранадос, & Пена, ˜ 2015; Вергер ва дигарон, 2014; Фон Буерен ва дигарон, 2015; C. Zhang & Ковач, 2012) |
| 2 | Remote phenotyping, yield estimation, crop surface model, counting of plants | (Bendig et al., 2013, 2014; Geipel et al., 2014; Gnadinger ¨ & Schmidhalter, 2017; Haghighattalab ва дигарон, 2016; Холман ва дигарон, 2016; Ҷин et al., 2017; W. Li et al., 2016; Maimaitijiang ва дигарон, 2017; Санкаран et al., 2015; Schirrmann et al., 2016; Shi et al., 2016; Yue et al., 2017; X. Чжоу ва дигарон, 2017) |
| 3 | Thermal imaging for water, тасвири бисёрспектрӣ | (Baluja et al., 2012; Berni et al., 2009b; Berni et al., 2009a ; Candiago et al., 2015; Gago et al., 2015; Gonzalez-Dugo et al., 2013, 2014; Гренздорффер ¨ ва дигарон, 2008; Холиқ et al., 2019; Matese et al., 2015; Рибейро-Гомес ва дигарон, 2017; Сантестебан ва дигарон, 2017; Уто ва дигарон, 2013) |
| 4 | Тасвири гиперсекралӣ, спектралӣ дидан | (Аасен ва дигарон, 2015a; Барет ва дигарон, 2015; Хакала ва дигарон, 2013; Honkavaara et al., 2013a; Lucieer ва дигарон, 2014; Саари ва дигарон, 2011; Suomalainen et al., 2014) |
| 5 | 3D-Mapping Applications | (Jim´enez-Brenes et al., 2017; Nex & Ремондино, 2014; Саломи ва дигарон, 2014; Torres-S´ Анчес, Лопес- ' Granados, Serrano, et al., 2015; Заҳавӣ ва дигарон, 2015; Зарко-Тежада ва дигарон, 2014) |
| 6 | Назорати кишоварзӣ | (SR Herwitz et al., 2004; Hunt ва дигарон, 2010; CCD Лелонг ва дигарон, 2008; Примисерио ва дигарон, 2012; Сян & Tian, 2011) |
Furthermore, drones are useful for challenging tasks in agriculture, including weed mapping. Images captured by the devices have proven their usefulness for early weed detection in fields (de Castro et al., 2018; Jim´enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ´ et al., 2016; Rozenberg et al., 2021). In this regard, de Castro et al. (2018) posit that the merge of UAV imagery and Object-Based Image Analysis (OBIA) has enabled practitioners to overcome the issue of automating early detection in early season grassland crops, which is a big step forward in weed research. Likewise, Pena ˜ et al. (2013) point out that the use of ultra-high spatial resolution images from UAV in conjunction with an OBIA procedure makes it possible to generate weed maps in early maize crops that could be used in planning the implementation of in-season weed control measures, a task beyond the capability of satellite and traditional airborne images. Compared to image classification or object detection algorithms, semantic segmentation techniques are more effective at weed mapping tasks (J. Deng et al., 2020), thus enabling farmers to detect field conditions, mitigate losses, and improve yields throughout the growing season (Ramesh et al., 2020). Deep learningbased semantic segmentation can also provide an accurate measurement of vegetation cover from high-resolution aerial images (Ramesh et al., 2020; A. Zheng et al., 2022). Despite their potential for remote
таснифоти пикселҳо, усулҳои сегментатсияи семантикӣ ҳисобкунии назаррас ва хотираи бениҳоят баланди GPU-ро талаб мекунанд (Ҷ. Денг ва дигарон, 2020).
Based on machine learning and UAV, P´erez-Ortiz et al. (2015) suggested a weed mapping approach to provide site-specific weed control strategies when farmers adopt the early-post emergence weed control. Finally, Rasmussen et al. (2013) highlighted that drones provide inexpensive sensing with great spatial resolution flexibility. Overall, the publications in this cluster focus on exploring the potentials of UAVs to support remote sensing, crop monitoring, and weed mapping. Additional in-depth research is needed to further investigate how drone applications in environmental monitoring, crop management, and weed mapping can achieve more sustainable agriculture (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018) and address governance issues of this technology in crop insurance applications (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021). Researchers should concentrate on validating UAVcollected measurements with efficient processing techniques to enhance the ultimate quality of processed data (Manfreda et al., 2018). Furthermore, the development of appropriate algorithms that recognize pixels that display weeds in the digital images and eliminate irrelevant background during UAV weed mapping is needed (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al., 2018, 2020; Lopez- ´ Granados et al., 2016). Additional research on the adoption of semantic segmentation techniques in plant recognition, leaf classification, and disease mapping is welcome (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020).
Cluster 2. The publications in this cluster focused on several aspects of agricultural drones. Related to remote phenotyping, Sankaran et al. (2015) reviewed the potential of using low-altitude, high-resolution aerial imaging with UAVs for quick phenotyping of crops in the field, and they argue that, as compared to ground-based sensing platforms, small UAVs with adequate sensors offer several advantages, such as easier access to the field, highresolution data, efficient data collection,
баҳодиҳии босуръати шароити нашъунамои киштзор ва хароҷоти ками истифода. Бо вуҷуди ин, муаллифон инчунин қайд мекунанд, ки истифодаи самараноки UAV барои фенотипсозии саҳро ба ду унсури асосӣ, яъне хусусиятҳои UAV (масалан, бехатарӣ, устуворӣ, ҷойгиршавӣ, мустақилият) ва хусусиятҳои сенсорӣ (масалан, ҳалли, вазн, дарозии мавҷҳои спектрӣ, майдон) такя мекунад. аз назари). Хагигатталаб ва дигарон. (2016) як лӯлаи коркарди тасвири нимавтоматиро барои дарёфти маълумоти сатҳи сюжет аз тасвирҳои UAV ва суръат бахшидан ба раванди парвариш пешниҳод кард. Холман ва дигарон. (2016) баланд бардошта шуд
throughput field phenotyping system and highlighted that UAV is able to collect quality, voluminous, field-based phenotypic data, and that the device is effective for large areas and across different field locations.
Азбаски арзёбии ҳосилнокӣ як ҷузъи бениҳоят муҳими иттилоот аст, алахусус ҳангоми дастрас будан, имкони UAV-ҳо барои таъмини ҳама ченакҳои саҳроӣ ва ба таври самаранок ба даст овардани маълумоти баландсифат мавҷуд аст (Даакир ва дигарон, 2017; Демир ва дигарон, 2018 Enciso et al., 2019; Pudelko et al., 2018; Дар ин бобат Ҷин ва дигарон. (2012) барои таҳия ва арзёбии усули баҳодиҳии зичии растании гандум дар марҳилаи пайдоиш аз тасвирҳои баландсифати UAV дар баландиҳои хеле паст истифода бурд. Ба гуфтаи муаллифон, UAVҳо маҳдудиятҳои системаҳои роверро, ки бо камераҳо муҷаҳҳаз шудаанд, бартараф мекунанд ва як усули ғайриинвазивии баҳодиҳии зичии растанӣ дар зироатҳоро муаррифӣ мекунанд, ки ба деҳқонон имкон медиҳад, ки новобаста аз ҳаракати хок ба ҳосилнокии баланди фенотипсозии саҳро ноил шаванд. Ли ва дигарон. (2017) бо истифода аз системаи дар асоси UAV барои ҳисоб кардани параметрҳои ҷуворимакка, аз ҷумла баландии сақф ва биомассаи болои замин садҳо тасвирҳои стереоро бо қарори бениҳоят баланд ҷамъоварӣ кардааст. Дар охир, Юе ва дигарон. (2016) муайян кард, ки баландии ҳосили аз UAV муайяншуда метавонад баҳодиҳии биомассаи болоии заминро (AGB) афзоиш диҳад.
Равиши мониторинги афзоиши зироат идеяи таҳияи моделҳои сатҳи зироат мебошад (Бендиг ва дигарон, 2014, 2015; Холман ва дигарон, 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021). Якчанд тадқиқот имконнопазирии тасвирҳои аз UAV гирифташударо барои гирифтани баландии растаниҳо ва назорати афзоиши онҳо таъкид карданд. Масалан, Бендиг ва дигарон. (2013) таҳияи моделҳои бисёрвақтии сатҳи зироатро бо қарори хеле баланд аз 0.05 м бо истифода аз UAV тавсиф кардааст. Онхо максад доштанд, ки хосилро ошкор кунанд
тағйирёбии афзоиш ва вобастагии он аз коркарди зироат, навъ ва стресс. Бендиг ва дигарон. (2014) UAV-ро барои ҳисоб кардани биомассаи тару тоза ва хушк дар асоси баландии растанӣ, ки аз моделҳои сатҳи зироат гирифта шудааст, истифода бурд ва муайян кард, ки бар хилофи платформаҳои ҳавоӣ ва сканеркунии лазерии заминӣ, тасвирҳои баландсифати UAV метавонад дақиқии моделсозии баландии растаниҳоро барои афзоиши гуногун ба таври назаррас афзоиш диҳад. марҳилаҳо. Ба хамин тарик, Гейпел ва дигарон. (2014) дар тадқиқоти худ барои ба даст овардани тасвирҳо UAV-ро истифода бурданд
datasets for maize grain yield prediction at three different growth phases from early to mid-season and concluded that the combination of spectral and spatial modeling based on aerial images and crop surface models is a suitable method for predicting mid-season maize yield. Finally, Gnadinger ¨ and Schmidhalter (2017) examined the utility of UAV in precision phenotyping and highlighted that the use of this technology could enhance farm management and enable field experimentation for breeding and agronomic purposes. Overall, we observe that the publications in cluster 2 focus on the main advantages of UAVs in remote
фенотипсозӣ, баҳодиҳии ҳосил, моделсозии сатҳи зироат ва ҳисобкунии растаниҳо. Тадқиқотҳои оянда метавонанд тавассути таҳияи усулҳои нави фенотипсозии дурдаст, ки метавонанд автоматӣ ва оптимизатсияи коркарди маълумоти дурдаст ҳис карда шаванд, амиқтар кобед (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et al. ., 2021). Илова бар ин, кори сенсорҳои IoT, ки дар UAV насб карда шудаанд ва муомилоти байни хароҷот, меҳнат ва дақиқи баҳодиҳии ҳосили онҳо бояд таҳқиқ карда шаванд.
future (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). Ultimately, there is a need to develop efficient image processing methods that can generate reliable information, maximize efficiency in agricultural production, and minimize the manual counting work of the farmers (R. U. Khan et al., 2021; Koh et al., 2021; Lin & Guo, 2020; C. Zhang et al., 2020).
Cluster 3. The publications in this cluster discuss the different types of imaging systems for remote sensing of agriculture resources used on UAV platforms. In this regard, thermal imaging allows the monitoring of surface temperatures to prevent crop damage and detect drought stress early (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; Yeom, 2021). Baluja et al. (2012) asserted that the use of multispectral and thermal cameras onboard the
UAV enabled researchers to obtain high resolution images and assess vine water status. This could be useful to develop novel water scheduling models using remote-sensing data (Baluja et al., 2012). Because of the
иктидори махдуди борбардории самолётхои пилотчигй, Рибейро-Гомес ва дигарон. (2017) интегратсияи камераҳои гармидиҳии хунукнашударо ба UAVS барои муайян кардани фишори об дар нерӯгоҳҳо баррасӣ кардааст, ки ин навъи UAV-ро нисбат ба зондгирии анъанавии моҳвораӣ ва UAV-ҳои бо камераҳои гармидиҳии сард муҷаҳҳазшуда самараноктар ва қобили ҳаёт мегардонад. Ба гуфтаи муаллифон, камераҳои гармидиҳии хунукнашуда нисбат ба камераҳои хунукшуда сабуктар буда, калибркунии мувофиқро талаб мекунанд. Гонсалес-Дуго ва дигарон. (2014) нишон дод, ки тасвирҳои гармӣ харитаҳои фазоии нишондиҳандаҳои фишори оби зироатҳоро барои арзёбии ҳолати об ва миқдори фишори об дар байни ва дар дохили боғҳои ситрусӣ ба таври муассир тавлид мекунанд. Гонсалес-Дуго ва дигарон. (2013) ва Santesteban et al. (2017) истифодаи тасвирҳои гармидиҳии UAV-и баландсифатро барои арзёбии тағирёбии вазъи об дар боғи тиҷоратӣ ва токзор таҳқиқ кардааст.
Multispectral imaging could provide massive data in comparison with traditional RGB (Red, Green, and Blue) images (Ad˜ ao et al., 2017; Navia et al., 2016). This spectral data, along with spatial data, could aid in classification, mapping, forecasting, prediction, and detection purposes (Berni et al., 2009b). According to Candiago et al. (2015), UAVbased multispectral imaging could contribute massively to crop assessment and precise agriculture as a reliable and efficient resource. Also,
Холиқ ва дигарон. (2019) муқоисаи байни моҳвора ва тасвири бисёрспектралии UAV асос ёфтааст. Тасвирҳои дар UAV асосёфта дар тавсифи тағирёбии токзорҳо ва инчунин харитаҳои қувват барои муаррифии сояҳои зироат дақиқтар шуданд. Хулоса, мақолаҳои ин кластер ворид кардани сенсорҳои тасвирии гармӣ ва бисёрспектрӣ ба UAV-ҳои кишоварзиро баррасӣ мекунанд. Мувофиқи он, барои фаҳмидани он ки чӣ гуна тасвирҳои гармидиҳӣ ва мултиспектралиро бо AI ҳамгиро кардан мумкин аст, таҳқиқоти бештар лозим аст.
techniques (e.g., deep learning) to detect plant stress (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). Such insights will help ensure more efficient and accurate detection as well as monitoring of plant growth, stress, and phenology (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020).
Кластер 4. Ин кластер аз ҳафт ҳуҷҷат иборат аст, ки дар атрофи нақши муҳими тасвири спектралӣ ва тасвири гиперспектралӣ дар дастгирии амалияҳои кишоварзӣ. Тасвири гиперспектрӣ худро ҳамчун усули аз фосилаи дур муайян кардааст, ки имкон медиҳад баҳодиҳии миқдории системаи замин (Schaepman et al., 2009) муайян карда шавад. таъини таносуби ҷузъҳои рӯизаминӣ
дар дохили пикселҳои омехта (Kirsch et al., 2018; Zhao et al., 2022). Ба ибораи дигар, қарори баландтари спектралӣ, ки аз ҷониби системаҳои гиперспектрӣ таъмин карда мешавад, имкон медиҳад, ки баҳодиҳии дақиқи параметрҳои гуногун, аз қабили хосиятҳои гиёҳхорӣ ё таркиби оби барг (Suomalainen et al., 2014). Муҳаққиқон дар ин кластер ҷанбаҳои гуногуни чунин системаҳоро таҳқиқ карданд. Дар байни дигарон, Аасен ва дигарон. (2015b) як усули беназирро барои ба даст овардани иттилооти се андозагирии гиперспекталӣ аз вазни сабук пешниҳод кард
snapshot cameras used on UAVs for vegetation monitoring. Lucieer et al. (2014) discussed the design, development, and aerial operations of a novel hyperspectral UAS as well as the calibration, analysis, and interpretation of the image data gathered with it. Finally, Honkavaara et al. (2013b) developed a comprehensive processing approach for FabryPerot interferometer-based spectral images and showed its use in a biomass estimate procedure for precision agriculture. Potential future pathways for this current cluster include emphasizing the need for technical improvements in sensor technologies (Aasen et al., 2015b) as well as the need for incorporating and enhancing complementary technologies, specifically big data and analytics (Ang & Seng, 2021; Radoglou-Grammatikis et al., 2020; Shakoor et al., 2019). The latter mainly stems from the ever-growing data generated by various sensors implemented in smart agriculture (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021).
Cluster 5. The publications in this cluster examined drones-based 3Dmapping applications. Using drones for 3D mapping could alleviate the complex fieldwork and increase efficiency substantially (Torres-Sanchez ´ et al., 2015). The five articles in the cluster mainly focused on plant monitoring applications. For example, to obtain three-dimensional data about canopy area, tree height, and crown volume, Torres-Sanchez ´ et al. (2015) used UAV technology to generate digital surface models and then object-based image analysis (OBIA) approaches. Further, Zarco-Tejada et al. (2014) quantified tree height by integrating UAV technology and three-dimensional photo-reconstruction methods. Jim´enez-Brenes Lopez-Granados, ´ De Castro, et al. (2017) demonstrated a new process for multi-temporal, 3D monitoring of dozens of olive trees by integrating UAV technology with advanced OBIA methodology. Interesting pathways for future works in this cluster include either improving current
методологияҳо (Зарко-Тежада ва дигарон, 2014) барои мақсадҳои моделсозии сатҳи рақамӣ (Ajayi et al., 2017; Jaud et al., 2016), ба монанди OBIA (де Кастро ва дигарон, 2018, 2020; Вентура ва дигарон. , 2018) ва барқарорсозии акс ё таҳияи усулҳои нав (Díaz-Varela et al., 2015; Torres-S' anchez et al., 2015).
Cluster 6. This cluster discusses the role of drones in agricultural surveillance. UAVs could complement and overcome the shortcomings of satellite and aircraft imaging. For example, they could provide high resolution near real-time imaging with less fuel or piloting challenges, resulting in constant and real-time surveillance and improvements in decision-making (S. Herwitz et al., 2004). Another key contribution of UAVs is their ability to provide site-specific data for precision agriculture or site-specific farming as their high resolution, detailed data about various parameters enable farmers to divide the land into homogeneous parts and treat them accordingly (Hunt et al., 2010; C. C. Lelong et al., 2008; Primicerio et al., 2012). Such UAV-based agricultural surveillance can support food security monitoring and decision making (S. R. Herwitz et al., 2004). To advance research in agricultural surveillance, not only improvements in sensors, UAVs, and other related technologies and their communication and data transfer methods are needed (Ewing et al., 2020; Shuai et al., 2019), but also integrating drones with various technologies for optimizing different tasks in relation to smart agriculture, such as monitoring, agricultural surveillance, and decisionmaking, is a high potential research area (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). In this regard, IoT, WSNs, and big data offer interesting complementary capabilities (van der Merwe et al., 2020). Implementation costs, cost savings, energy efficiency, and data security are among the under-researched areas for such integration (Masroor et al., 2021).
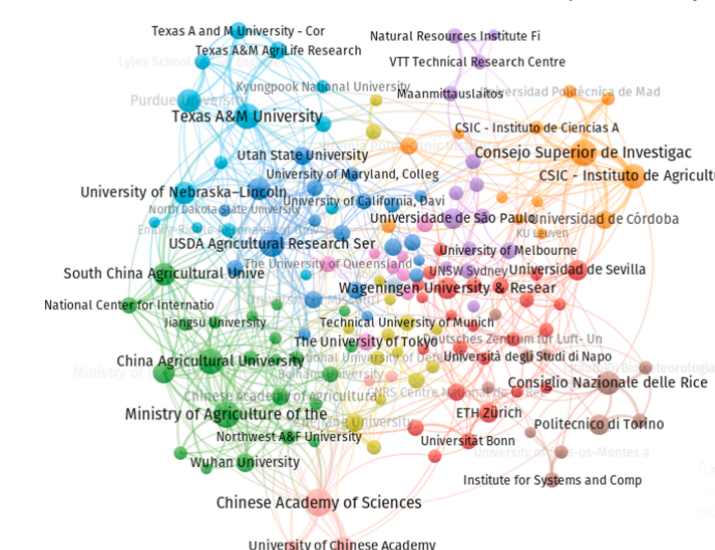
Countries and academic institutions
The final step included the investigation of the country of origin and the academic affiliations of the authors. Through this analysis, we aim to better understand the geographic distribution of scholars who contribute to the applications of drones in agriculture. It is noteworthy to notice the diversity of countries and academic institutions. From a country perspective, the USA, China, India, and Italy rank at the top of the list in terms of the number of publications (Table 7). The current
research on agricultural drones is largely centered in North American and Asian countries, mainly due to their high engagement in precision agriculture applications. For example, in the USA, the market of agricultural drones was estimated at 841.9 million USD in the year 2020, accounting for approximately 30% of the global market share (ReportLinker, 2021). Ranking as the world’s largest economy, China is predicted to reach an approximate market size of 2.6 billion USD in the year 2027. This country is appealing for agricultural drones to overcome productivity issues and achieve better yields, labor alleviation, and lesser production inputs. However, the adoption of the technology in China is also driven by factors such as the population size and the needto innovate and improve existing crop management practices.
Top most productive countries and universities/organizations that contribute to
agricultural drone-related research.
| рутба | Кишварҳо |
| 1 | ИМА |
| 2 | Хитой |
| 3 | Ҳиндустон |
| 4 | Италия |
| 5 | Испания |
| 6 | Олмон |
| 7 | Бразилия |
| 8 | Австралия |
| 9 | Ҷопон |
| 10 | Инглистон |
| рутба | Universities/ Organizations |
| 1 | Академияи илмҳои Чин |
| 2 | Ministry of Agriculture of the People’s Republic of China |
| 3 | Шӯрои олии тафтишоти илмӣ |
| 4 | Донишгоҳи Техас A&M |
| 5 | Донишгоҳи аграрии Чин |
| 6 | USDA Хадамоти тадқиқоти кишоварзӣ |
| 7 | CSIC - Instituto de Agricultura Sostenible IAS |
| 8 | University of Purdue |
| 9 | Шӯрои Миллии Тадқиқот |
| 10 | Донишгоҳи кишоварзии Ҷанубӣ |
From a university and organizational perspective, Chinese Academy of Sciences tops the list in terms of the number of publications, followed by Ministry of Agriculture of the People’s Republic of China and Consejo Superior de Investigaciones Científicas. Chinese Academy of Sciences is represented by the authors Liao Xiaohan and Li Jun; Han Wenting represents the Ministry of Agriculture of the People’s Republic of China; and Consejo Superior de Investigaciones Científicas is represented by Lopez-Granados, ´ F. and Pena, ˜ Jos´e María S. From the USA, universities like the Texas A&M University and Purdue University find their
зикр. Донишгоҳҳое, ки шумораи бештари нашрияҳо ва робитаҳои онҳо дар расми 4 нишон дода шудаанд. Илова бар ин, ба ин рӯйхат муассисаҳое, аз қабили Consiglio Nazionale delle Ricerche ва Consejo Superior de Investigaciones Científicas дохил мешаванд, ки дар пажӯҳишҳои илмӣ фаъоланд, вале муассисаҳои таълимӣ нестанд. .
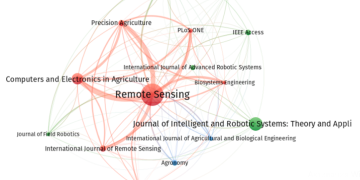
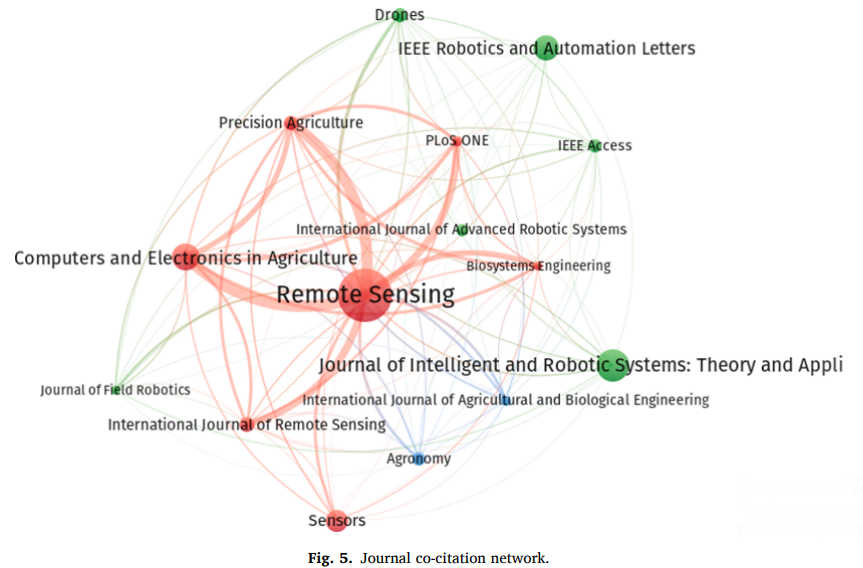
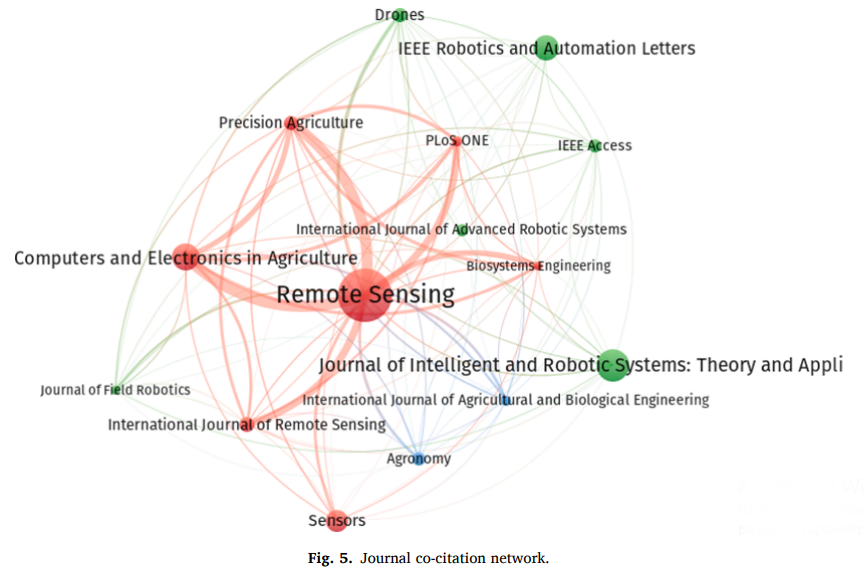
Our selection included a wide variety of journals, encompassing virtually all of the available data. As is shown in Table 8, Remote Sensing with 258 articles ranks at the top, followed by Journal of Intelligent and Robotic Systems: Theory and Applications with 126 and Computers and Electronics in Agriculture with 98 articles. While Remote Sensing is mostly focused on the application and development of drones, Computers and Electronics in Agriculture mainly covers advances in computer hardware, software, electronics, and control systems in agriculture. Cross-area outlets, such as IEEE Robotics and Automation Letters with 87 publications and IEEE Access with 34 publications, are also premier outlets in the field. The top fifteen outlets have contributed to the literature with 959 documents, which is approximately 20.40% of all publications. A journal co-citation analysis enables us to examine the importance and similarity between publications. The co-citation analysis yields three clusters, as shown in Fig. 5. The red cluster consists of journals such as Remote Sensing, Computer and Electronics in Agriculture, Sensors,
and the International Journal of Remote Sensing. All of these outlets are highly reputable journals in the areas of remote sensing and precision agriculture. The green cluster contains journals that deal with robotics, such as Journal of Intelligent and Robotic Systems: Theory and Applications, IEEE Robotics and Automation Letters, IEEE Access, and Drones. These outlets mostly publish papers on automation and are useful for agricultural engineers. The final cluster is formed by journals related to agronomy and agricultural engineering, like Agronomy and International Journal of Agricultural and Biological Engineering.
Беҳтарин 15 маҷалла дар таҳқиқоти марбут ба бесарнишини кишоварзӣ.
| рутба | журнал | Ҳисоб кунед |
| 1 | Санҷиши дурдаст | 258 |
| 2 | Journal of Intelligent and Robotic Systems: Theory and Барномаҳо | 126 |
| 3 | Компютер ва электроника дар хочагии кишлок | 98 |
| 4 | IEEE Robotics and Automation Letters | 87 |
| 5 | санҷанда | 73 |
| 6 | Маҷаллаи Байналмилалии Занги дур | 42 |
| 7 | Кишоварзии дақиқ | 41 |
| 8 | Drones | 40 |
| 9 | Аглимӣ | 34 |
| 10 | Дастрасии IEEE | 34 |
| 11 | Маҷаллаи байналмилалии системаҳои пешрафтаи робототехникӣ | 31 |
| 12 | International Journal of Agricultural and Biological Engineering | 25 |
| 13 | Бале | 25 |
| 14 | Journal of Field Robotics | 23 |
| 15 | Engineering Biosystems | 23 |
хулоса
хулоса
Дар ин таҳқиқот, мо таҳқиқоти мавҷударо дар бораи дронҳои кишоварзӣ ҷамъбаст ва таҳлил кардем. Бо истифода аз усулҳои гуногуни библиометрӣ, мо кӯшиш кардем, ки сохтори зеҳнии тадқиқоти бесарнишини кишоварзиро беҳтар фаҳмем. Дар маҷмӯъ, баррасии мо тавассути муайян кардан ва муҳокима кардани калимаҳои калидӣ дар адабиёт, ошкор кардани кластерҳои дониш ҳангоми ташаккули ҷамоаҳои семантикӣ дар соҳаи дронҳо, тавсифи таҳқиқоти қаблӣ ва пешниҳоди самтҳои тадқиқоти оянда якчанд саҳмҳоро пешниҳод мекунад. Дар зер мо хулосаҳои асосии баррасиро оид ба рушди дронҳои кишоварзӣ баён мекунем:
• The overall literature has grown rapidly and attracted enormous attention over the last decade, as indicated by the rise in the number of articles after 2012. Even though this knowledge field is yet to attain its full maturity (Barrientos et al., 2011; Maes & Steppe, 2019), several questions are still unanswered. For instance, the utility of drones in indoor farming is still open for debate (Aslan et al., 2022; Krul et al., 2021; Rold´ an et al., 2015). The complexity of fields scenes and the different imaging circumstances (e.g., shadows and illumination) could result in a higher spectral in-class variance (Yao et al., 2019). Even in the later research phases, researchers have been challenged to determine optimal flight plans according to particular scenarios and required image quality (Soares et al., 2021; Tu et al.,
2020).
• We notice that the field has progressed from developing efficient UAV systems to incorporating AI techniques, such as machine learning and deep learning in the design of agricultural drones (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al., 2020; Mazzia et al., 2020; Tetila et al., 2020).
• Research on agricultural drones predominately discussed remote sensing by exploring the potentials of the technology in environmental monitoring, crop management, and weed management (cluster 1) as well as remote phenotyping and yield estimation (cluster 2). A set of influential studies on agricultural drones include Austin (2010), Berni et al. (2009)a, Herwitz et al. (2004), Nex and Remondino (2014), and Zhang and Kovacs (2012). These studies developed the conceptual basis of drone-related research in the context of agriculture.
• Вобаста ба методология, мо мушоҳида кардем, ки аксари тадқиқотҳое, ки то ҳол анҷом дода шудаанд, аз тарҳрезии система, консептуалӣ ё таҳқиқоти баррасишуда иборат буданд (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz et al. , 2015; Yao et al., 2019). Мо инчунин набудани усулҳои таҷрибавӣ, сифатӣ ва омӯзиши мисолиро дар кор дар таҳқиқи дронҳои кишоварзӣ мушоҳида мекунем.
• Recently, topics related to precision agriculture, AI techniques, precision viticulture, and water stress assessment have drawn substantial attention (Espinoza et al., 2017; Gomez-Cand ´ on ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021). Careful examination of research clusters in two separate eras, 1990–2010 and 2011–2021, reveals the progress of the domain’s intellectual structure. The period from 1990 to 2010 constituted the build-up of central notions and the concepts of drones, which is obvious from the discussion of UAV design, development, and implementation. In the second era, the research focus expands on prior studies, making an effort to synthesize UAV use cases in agriculture. We also found numerous studies that discuss drone applications in imaging tasks and precision agriculture.
| рутба | журнал | Ҳисоб кунед |
| 1 | Санҷиши дурдаст | 258 |
| 2 | Journal of Intelligent and Robotic Systems: Theory and | 126 |
| Барномаҳо | ||
| 3 | Компютер ва электроника дар хочагии кишлок | 98 |
| 4 | IEEE Robotics and Automation Letters | 87 |
| 5 | санҷанда | 73 |
| 6 | Маҷаллаи Байналмилалии Занги дур | 42 |
| 7 | Кишоварзии дақиқ | 41 |
| 8 | Drones | 40 |
| 9 | Аглимӣ | 34 |
| 10 | Дастрасии IEEE | 34 |
| 11 | Маҷаллаи байналмилалии системаҳои пешрафтаи робототехникӣ | 31 |
| 12 | International Journal of Agricultural and Biological Engineering | 25 |
| 13 | Бале | 25 |
| 14 | Journal of Field Robotics | 23 |
| 15 | Engineering Biosystems | 22 |
оқибатҳои
Баррасии библиометрии мо бо дарназардошти олимон, фермерон, коршиносони соҳаи кишоварзӣ, машваратчиёни зироат ва тарроҳони системаи UAV тарҳрезӣ ва гузаронида шуд. Ба маълумоти беҳтарини муаллифон, ин яке аз аввалин баррасиҳои аслӣ мебошад, ки таҳлили амиқи библиометрии
drone applications in agriculture. We have conducted a comprehensive review of this knowledge body, employing citation and co-citation analyses of publications. Our attempts to describe the intellectual structure of drone research also offer new insights for academics. A careful review of the keywords used over time reveals the hotspots and focal research areas in the drone-related literature. Furthermore, we present a list of most cited studies to identify the most impactful research works completed in the field. The identification of articles and keywords could consequently provide a solid starting point to uncover several avenues for future studies.
Importantly, we revealed clusters that classify comparable works and elaborated on the results. The studies classified in clusters aid in understanding the intellectual structure of UAV research. Notably, we discovered a dearth of studies that investigate drones’ adoption factors
and barriers in farming activities (see Table 9). Future researchers could address this potential gap by conducting empirical investigations that evaluate drones’ adoption factors in different farming activities and climatic conditions. Furthermore, case study-based research regarding the effectiveness of drones should be backed with real data from the field. Also, involving farmers and managers in academic research would be advantageous for both the theoretical and practical advancement of drone research. We were also able to identify the most prominent researchers and their contributions, which is valuable because awareness of recent seminal works can offer some guidance for future academic endeavors.
Љадвали 9
Монеаҳои қабули UAV.
| Монеа | Тавсифи |
| Амнияти маълумот | Cyber security is a major challenge for implementing IoT solutions (Masroor et al., 2021). |
| Муносибати мутақобила ва ҳамгироии | Various technologies such as UAV, WSN, IoT, etc. should be integrated and transmit data which баланд бардоштани сатҳи мураккабӣ (Алсамхи ва дигарон, 2021; Popescu et al., 2020; Vuran et al., 2018). |
| Хароҷоти татбиқ | Ин махсусан барои фермерҳои хурд ва барои ҳамгироии технологияҳои муосир ( Masroor et al., 2021). |
| дониши мехнатй ва коршиносон | Барои идора кардани ҳавопаймоҳои бесарнишин пилотҳои бомаҳорат лозиманд. Also, implementing various cutting-edge technologies requires skilled workers (Y. B. Huang ва дигарон, 2013; Цурос ва дигарон, 2019). |
| Қувваи муҳаррик ва парвоз давомнокӣ | Дронҳоро соатҳои тӯлонӣ идора карда наметавонанд large areas (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Stability, reliability, and манёврпазирӣ | Drones are not stable during bad weather conditions (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Маҳдудиятҳои боркашонӣ ва sensors’ quality | Танҳо дронҳо метавонанд борҳои маҳдудро бардоранд қобилияти бор кардани сенсорҳои пастсифат (Nebiker ва дигарон, 2008). |
| танзим | Тавре ки дронҳо метавонанд хатарнок бошанд, онҳо хеле вазнинанд муқаррарот дар баъзе соҳаҳо (Hardin & Jensen, 2011; Laliberte & Rango, 2011). |
| Дониши дехконон ва манфиат | Мисли дигар технологияҳои пешрафта, дронҳо successful implementation needs expertise and also accompanied with uncertainties (Fisher et al., 2009; Lambert et al., 2004; Stafford, 2000). |
Since there is a constant need to efficiently use available resources to maximize yields, farmers can take advantage of drones to ensure rapid, accurate, and cost-effective scanning of their fields. The technology can support farmers to determine their crops’ condition and assess water status, the stage of ripening, insect infestations, and nutritional needs. The remote-sensing capabilities of drones can provide farmers with crucial data to anticipate issues at an early stage and promptly make suitable interventions. However, the benefits of the technology can only be realized if the challenges are properly addressed. In light of the
current problems regarding data security, sensor technology issues (e.g., the reliability or accuracy of measurements), complexity of integration, and substantial implementation costs, future studies must also examine the technical, economic, and operational feasibility of integrating agricultural drones and other cutting-edge technologies.
Маҳдудияти
Our study has several limitations. Firstly, the findings are determined by the publications selected for the final analysis. It is challenging to capture all relevant studies related to agricultural drones, particularly those not indexed in the Scopus database. Further, the data collection process is limited to the setting of search keywords, which may not be inclusive and lead to inconclusive findings. Thus, future studies need to pay more attention to the underlying issue of data collection to make
more reliable conclusions. Another limitation concerns new publications with a low number of citations. The bibliometric analysis is biased toward earlier publications as they tend to receive more citations over the years. Recent studies need a certain amount of time to attract attention and accumulate citations. Consequently, recent studies that bring a paradigm shift would not rank in the top ten influential works. This limitation is prevalent in the examination of rapidly emerging research domains like agricultural drones. As we have consulted Scopus to study the literature for this work, future researchers could consider different
databases, such as the Web of Science and IEEE Xplore, to expand the horizon and enhance the research structure.
Potential bibliometric studies may consider other vital knowledge sources like conference papers, chapters, and books to generate novel insights. Despite mapping and investigating global publications on agricultural drones, our findings did not reveal the reasons behind the scholarly outputs of universities. This paves the way to a novel area of research in qualitatively explaining why some universities are more productive than others when it comes to research about agricultural
drones. In addition, future studies could provide insights into the potential of drones to increase farming sustainability in several ways such as environmental monitoring, crop management, and weed mapping as indicated by several researchers (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b). Since the textual analysis was not possible due to the high number of selected papers, there is a need for systematic literature reviews that examine the
research methods used and the involvement of farmers in prior studies. In short, our analysis of drone research exposes the invisible linkages of this knowledge body. This review therefore helps to uncover the relationships among publications and explores the intellectual structure of the research field. It also depicts the linkages between the various aspects of the literature, such as authors’ keywords, affiliations, and countries.
Эъломияи манфиатҳои рақобат
Муаллифон изҳор медоранд, ки онҳо манфиатҳои молиявии рақобатпазир ва муносибатҳои шахсӣ надоранд, ки метавонистанд ба кори дар ин мақола овардашуда таъсир расонанд.
Замимаи 1
TITLE-ABS-KEY (((drone* OR “unmanned aerial vehicle” OR uav* OR “unmanned aircraft system” OR uas Ё «самолётхои ба масофаи дур идорашаванда”) ВА (кишоварзӣ Ё кишоварзӣ Ё кишоварзӣ Ё фермер))) AND (EXCLUDE (PUBYEAR, 2022)) AND (LIMIT-TO (LANGUAGE, “English”)).
Адабиёт
Аасен, Х., Буркарт, А., Болтен, А., Барет, Г., 2015. Таҳияи иттилооти гиперспектралии 3D бо камераҳои сабуки UAV барои мониторинги растаниҳо: аз
калибровкаи камера ба кафолати сифат. ISPRS J. Фотограмма. Сенсори дурдаст 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. Development of pattern recognition algorithm for automatic bird detection from unmanned aerial vehicle imagery.
Survey. Land Inform. Sci. 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, M.M., Zailani, S., 2021. Wireless sensor networks in agriculture: insights from bibliometric analysis. Sustainability 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., Арзёбии усулҳои гуногуни ошкор кардани сояҳо дар тасвирҳои оптикии баландсифат ва арзёбии таъсири соя ба ҳисоб. NDVI ва бухоршавӣ. Ирриг. Илм. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, J.J., 2017. Hyperspectral imaging: a review on UAV-based sensors, data processing and
applications for agriculture and forestry. Remote Sensing 9 (11). https://doi.org/ 10.3390/rs9111110.
Aguera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. Тасвирҳои бисёрвақтӣ бо истифода аз ҳавопаймои бесарнишин барои мониторинги зироати офтобпараст. Биосист. Eng.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, O.G., Salubi, A.A., Angbas, A.F., Odigure, M.G., 2017. Generation of accurate digital elevation models from UAV acquired low percentage overlapping images. Int.
J. Remote Sens. 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. Review of machine learning approaches for biomass and soil moisture retrievals from remote sensing data. Remote Sensing 7 (12), 16398–16421.
Alsamhi, S.H., Afghah, F., Sahal, R., Hawbani, A., Al-qaness, M.A.A., Lee, B., Guizani, M., Green internet of things using UAVs in B5G networks: A review of applications
ва стратегияҳо. Ад. Хок. шабака. 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Ал-Тани, Н., Албуайнайн, А., Алнаими, Ф., Зорба, Н., 2020. Дронҳо барои мониторинги чорвои гӯсфанд. Дар: 20-умин Конфронси электротехникии IEEE Миёназамин. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. UAV-based high throughput phenotyping in citrus utilizing multispectral imaging and artificial intelligence. Remote Sensing 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: Cloud-based application to process, analyze and visualize UAV-collected data for precision agriculture applications utilizing artificial intelligence. Comput. Electron. Agric. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. Маълумоти калон ва омӯзиши мошин бо иттилооти гиперспекталӣ дар соҳаи кишоварзӣ. Дастрасии IEEE 9, 36699–36718. https://doi.org/10.1109/
ACCESS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. Барраси: Технологияҳои дақиқи чорводорӣ дар системаҳои чорводории чарогоҳҳо. Ҳайвон 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, T.A., Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., Trends on advanced information and communication technologies for
improving agricultural productivities: a bibliometric analysis. Agronomy 10 (12), Article 12. https://doi.org/10.3390/agronomy10121989.
Армстронг, И., Пирроне-Брусс, М., Смит, А., Ҷадуд, М., 2011. Гатори парвозкунанда: ба сӯи робототехникаи ҳавоӣ дар occam-π. Коммун. Архитектори раванд. 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
Арора, SD, Чакраборти, А., 2021. Сохтори зеҳнии рафтори шикоятии истеъмолкунандагон (CCB) тадқиқот: Таҳлили библиометрӣ. J. Business Res. 122, 60-74.
Аслан, МФ, Дурду, А., Сабанчи, К., Ропелевска, Е., Гултекин, SS, 2022.
A comprehensive survey of the recent studies with UAV for precision agriculture in open fields and greenhouses. Appl. Sci. 12 (3), 1047. https://doi.org/10.3390/
app12031047.
Atkinson, J. A., Jackson, R. J., Bentley, A. R., Ober, E., & Wells, D. M. (2018). Field Phenotyping for the Future. In Annual Plant Reviews online (pp. 719–736). John
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
Остин, Р., 2010. Системаҳои ҳавопаймоҳои бесарнишин: Тарҳрезӣ, таҳия ва ҷойгиркунии UAVS. Дар: Системаҳои ҳавопаймоҳои бесарнишин: Тарроҳӣ, таҳия ва
Deployment. John Wiley and Sons. https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, M.J.M., Zaman, Q.U., Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, A.A., Afzal, M.M., Liu, C., 2022. UAVbased remote sensing in plant stress imagine using high-resolution thermal sensor for digital agriculture practices: a meta-review. Int. J. Environ. Sci. Technol. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Smart farming: Opportunities, challenges
and technology enablers. 2018 IoT Vertical and. Topical Summit on Agriculture -Tuscany (IOT Tuscany) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, M.D., Hafiane, A., Canals, R., 2018. Deep learning with unsupervised data labeling for weed detection in line crops in UAV images. Remote Sensing 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Normative versus social constructivist processes in the allocation of citations: a network-analytic model. Am. Sociol. Rev. 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, M.P., Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. Assessment of vineyard water status variability by thermal and multispectral
imagery using an unmanned aerial vehicle (UAV). Irrig. Sci. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L., Селекция насли оянда. Илмҳои растанӣ. 242, 3–13. https://doi.org/10.1016/j.
plantsci.2015.07.010.
Barbedo, J.G.A., Koenigkan, L.V., 2018. Perspectives on the use of unmanned aerial systems to monitor cattle. Outlook Agric. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Hyperspectral-вазни паст ва асоси UAV камераҳои пурра чорчӯбаи
барои мониторинги зироатҳо: Муқоисаи спектралӣ бо ченакҳои сайёраи спектрорадиометр. Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Aerial remote sensing in agriculture: A practical approach to area coverage
and path planning for fleets of mini aerial robots. J. Field Rob. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Басири, А., Мариани, В., Силано, Г., Аатиф, М., Ианелли, Л., Глиелмо, Л., 2022. Тадқиқот оид ба татбиқи алгоритмҳои банақшагирии роҳ барои UAVs бисёр роторӣ дар дақиқ
agriculture. J. Navig. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. The state-of-the-art of knowledge-intensive agriculture: a review on applied sensing systems and data analytics. J. Sens. 2018, 1–13.
Бендиг, Ҷ., Болтен, А., Барет, Г., 2013. Тасвир дар асоси UAV барои моделҳои бисёрвақтӣ ва баландсифати сатҳи зироат барои назорат кардани тағирёбии афзоиши зироат. Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. Баҳодиҳии биомассаи ҷав бо истифода аз моделҳои сатҳи зироат (CSMs), ки аз тасвири UAV дар асоси RGB гирифта шудаанд. Санҷиши дурдаст 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, M.L., Bareth, G., 2015. Combining UAV-based plant height from crop surface models,
нишондиҳандаҳои растаниҳои намоён ва наздики инфрасурх барои мониторинги биомасса дар ҷав. Int. J. Appl. Оби Замин. Geoinf. 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, J.A., Zarco-Tejada, P.J., Sepulcre-Canto, ´ G., Fereres, E., Villalobos, F., 2009a. Mapping canopy conductance and CWSI in olive orchards using high resolution
thermal remote sensing imagery. Remote Sens. Environ. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Берни, Ҷ.А., Зарко-Тежада, Пи Ҷей, Суарес, 'Л., Феререс, Э., 2009б. Санҷиши дурдасти ҳароратӣ ва тангдаромад барои мониторинги растаниҳо аз ҳавопаймои бесарнишин. IEEE Транс. Геоскӣ. Сенсори дурдаст 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Интернети чизҳо дар амнияти озуқаворӣ: Баррасии адабиёт ва таҳлили библиометрӣ. Тамоюлҳои озуқаворӣ Sci. Технология. 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT in agriculture: Designing a Europe-wide large-scale pilot. IEEE Commun. Mag. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. Пайгирии UAV бисёрсенсории ниҳолҳои инфиродӣ ва ҷамоаҳои ниҳолҳо бо дақиқии миллиметр. Дронҳо 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. Арзёбии тасвирҳои multispectral ва индексҳои растанӣ барои барномаҳои дақиқ кишоварзӣ аз тасвирҳои UAV. Ҳисси дурдаст 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, G.L., Luo, Y.K., Pan, Q., Zhang, S.Y., 2020. Monitoring of sugar beet growth indicators using wide-dynamic-range vegetation index (WDRVI) derived from UAV
multispectral images. Comput. Electron. Agric. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. Evolution of the intellectual structure of family business literature: a bibliometric study of FBR. Family Business Rev. 20 (2), 141–162.
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. Dynamic monitoring of biomass of rice under
different nitrogen treatments using a lightweight UAV with dual image-frame snapshot cameras. Plant Methods 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
Чамуа, А., Сингх, Р., 2019. Таъмини устуворӣ дар кишоварзии Ҳиндустон тавассути UAV шаҳрвандӣ: дурнамои масъули инноватсия. SN Appl. Илм. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. Responsible governance of civilian unmanned aerial vehicle (UAV) innovations for Indian crop insurance applications. J. Responsible
Technol. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. Applying high-resolution visible-channel aerial imaging of crop canopy to precision irrigation management. Agric. Water
Manag. 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Даакир, М., Пиеррот-Деселлигни, М., Боссер, П., Пичард, Ф., Том, С., Работ, Ю., Мартин, О., 2017. UAV сабук бо фотограмметрия ва мавқеъгирии ягонаи басомади GPS барои барномаҳои метрология. ISPRS J. Фотограмма. Сенсори дурдаст 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. Blockchain-based IoT platform for autonomous drone operations management. In: Proceedings of the 2nd ACM
Семинари MobiCom оид ба алоқаи бесими бо ёрии дрон барои 5G ва берун аз он, саҳ. 31–36. https://doi.org/10.1145/3414045.3415939.
Day, RA, Gastel, B., 1998. Чӣ тавр навиштан ва нашр кардани мақолаи илмӣ. Матбуоти Донишгоҳи Кембриҷ. де Кастро, AI, Пена, ˜ JM, Торрес-Санчес, ´ J., Jim´enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., ´ F., 2020. зироатҳоро бо тартиби автоматии дарахти қарор-OBIA ва тасвири UAV барои токпарварии дақиқ фаро гиред. Ҳисси дурдаст 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, A.I., Torres-S´ anchez, J., Pena, ˜ J.M., Jim´enez-Brenes, F.M., Csillik, O., Lopez- ´Granados, F., 2018. An automatic random forest-OBIA algorithm for early weed mapping between and within crop rows using UAV imagery. Remote Sensing 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ N.K., Akar, T., Ünal, S., 2018. Automated Measurement of Plant Height of Wheat Genotypes Using a DSM Derived from UAV Imagery. Proceedings 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. Lightweight semantic segmentation network for real-time weed mapping using unmanned aerial vehicles. Appl. Sci. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. UAV-based multispectral remote sensing for precision agriculture: a comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 146, 124–136.
Диас-Гонсалес, FA, Вуэлвас, Ҷ., Корреа, CA, Vallejo, VE, Патино, Д., 2022. Омӯзиши мошинҳо ва усулҳои ҳассосияти фосилавӣ барои арзёбии нишондиҳандаҳои хок - барраси. Экол. Инд. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Диаз-Варела, Р.А., Де ла Роза, Р., Леон, ´ Л., Зарко-Тежада, PJ, 2015. Тасвири баландсифати UAV-и ҳавоӣ барои арзёбии параметрҳои тоҷи дарахти зайтун бо истифода аз акси 3D
reconstruction: application in breeding trials. Remote Sensing 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, S.K., 2021. Airport capacity management: a review and bibliometric analysis. J. Air Transp. Manag. 91, 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, J.M., Walters, D., Cable, J., Wilson, J., 2019.
Истифодаи тасвирҳои RapidEye барои муайян кардани тағирёбии дар дохили майдонҳои афзоиш ва ҳосили зироат дар Онтарио, Канада. Precision Agric. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, P.K., Mitra, S., 2021. Application of agricultural drones and iot to understand food supply chain during post COVID-19. In: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), Agricultural Informatics: Automation Using the IoT and Machine Learning. Wiley, pp. 67–87. van Eck, N., Waltman, L., 2009. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, T.A., Orikumhi, I., Leow, C.Y., Hindia, M.N., 2018. An overview of Internet of Things (IoT) and data analytics in agriculture: benefits and challenges.
IEEE Internet Things J. 5 (5), 3758–3773.
Энсисо, Ҷ., Авила, CA, Ҷунг, Ҷ., Элсайед-Фараг, С., Чанг, А., Йеом, Ҷ., Ландивар, Ҷ., Маеда, М., Чавес, JC, 2019. Тасдиқи агрономӣ UAV ва саҳро
measurements for tomato varieties. Comput. Electron. Agric. 158, 278–283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, C.Z., Khot, L.R., Sankaran, S., Jacoby, P.W., 2017. High resolution multispectral and thermal remote sensing-based water stress assessment in
subsurface irrigated grapevines. Remote Sensing 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. Utilizing hyperspectral remote sensing for soil gradation. Remote Sensing 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312.
Фосетт, Д., Панигада, С., Таглиабу, Г., Бошетти, М., Селести, М., Евдокимов, А., Бирюкова, К., Коломбо, Р., Мигьетта, Ф., Расшер, У. Андерсон, К., 2020. Арзёбии бисёрҷабҳаи инъикоси сатҳи бисёрспектралии дрон ва индексҳои растанӣ дар шароити амалиётӣ. Ҳисси дурдаст 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. Study of wireless communication technologies on Internet of Things for precision agriculture. Wireless Pers. Commun. 108 (3),
1785-1802.
Ferreira, M.P., Pinto, C.F., Serra, F.R., 2014. The transaction costs theory in international business research: a bibliometric study over three decades. Scientometrics 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. Advances in precision agriculture in south-eastern Australia. I. a regression methodology to simulate
тағирёбии фазоии ҳосили ғалладона бо истифода аз ҳосили таърихии деҳқонон ва шохиси муқаррарии фарқияти растаниҳо. Чарогоҳҳои зироаткорӣ. 60 (9), 844–858.
Floreano, D., Wood, R.J., 2015. Science, technology and the future of small autonomous drones. Nature 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, M.A., Shu, L., Maglaras, L.A., Wang, X., 2021. Internet of things for the future of smart agriculture: a comprehensive survey of emerging technologies. IEEE CAA J. Autom. Sinica 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ J.M., 2019. Fig plant segmentation from aerial images using a deep convolutional encoder-decoder network. Remote Sensing 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, R.E., Gallego, P.P., Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs challenge to assess water stress for
sustainable agriculture. Agric. Water Manag. 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
Гарсиа-Тежеро, IF, Рубио, АЭ, Винуэла, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodriguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. Тасвирҳои гармидиҳӣ дар завод
сатҳ барои арзёбии ҳолати зироатҳои об дар дарахтони бодом (cv. Guara) дар доираи стратегияҳои обёрии каср. кишоварзӣ. Идораи об. 208, 176–186. https://doi.org/10.1016/j.
авват.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. Surface reflectance and suninduced fluorescence spectroscopy measurements using a small hyperspectral UAS. Remote Sensing 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. An automatic method for
харитаи алафхои бегона дар заминхои овёс дар асоси тасвири UAV. Ҳисоб кардан. Электрон. кишоварзӣ.
Гебберс, Р., Адамчук, VI, 2010. Кишоварзии дақиқ ва амнияти озуқаворӣ. Илм 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. Combined spectral and spatial modeling of corn yield based on aerial images and crop surface models acquired with an unmanned aircraft system. Remote Sensing 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. Sustainable design for users: a literature review and bibliometric analysis. Environ. Sci. Pollut. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, C.M., Suomalainen, J., Tang, J., Kooistra, L., 2015. Generation of spectraltemporal response surfaces by combining multispectral satellite and hyperspectral
UAV imagery for precision agriculture applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, S.S., Chana, I., Buyya, R., 2017. IoT based agriculture as a cloud and big dataservice: the beginning of digital India. J. Org. and End User Comput. (JOEUC) 29 (4),
1-23.
Gmür, M., 2006. Co-citation analysis and the search for invisible colleges: a methodological evaluation. Scientometrics 57 (1), 27–57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. Digital counts of maize plants by Unmanned Aerial Vehicles (UAVs). Remote Sensing 9 (6). Https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, A.H., Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. A Rotary-wing unmanned air vehicle for aquatic weed surveillance and
management. J. Intell. Robotic Syst.: Theor. Appl. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´ on, ´ D., De Castro, A.I., Lopez-Granados, ´ F., 2014. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´ on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. Field phenotyping of water stress at tree scale by UAV-sensed imagery: new insights for
ба даст овардани гармӣ ва калибрченкунӣ. дақиқ. кишоварзӣ. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Гонсалес-Дуго, В., Зарко-Тежада, Пи Ҷей, Феререс, Э., 2014. Татбиқ ва маҳдудиятҳои истифодаи индекси фишори оби зироат ҳамчун нишондиҳандаи норасоии об дар боғҳои ситрусӣ. кишоварзӣ. Барои. Метеорол. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Гонсалес-Дуго, В., Зарко-Тежада, П., Николас, ´ Е., Нортес, ПА, Аларкон, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. Истифодаи тасвирҳои гармидиҳии UAV-и баландсифат барои
assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
Гоял, К., Кумар, С., 2021. Саводнокии молиявӣ: Баррасии систематикӣ ва таҳлили библиометрӣ. Int. J. Таҳқиқоти истеъмолӣ 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ G.J., Engel, A., Teichert, B., 2008. The photogrammetric potential of lowcost uavs in forestry and agriculture. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences – ISPRS Archives 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
Гуан, С., Фуками, К., Мацунака, Х., Оками, М., Танака, Р., Накано, Х., Сакай, Т., Накано, К., Охдан, Х., Такахаши, К. 2019. Арзёбии таносуби баландсифат
NDVI with fertilizer application level and yield of rice and wheat crops using small UAVs. Remote Sensing 11 (2), 112.
Gundolf, K., Filser, M., 2013. Management research and religion: a citation analysis. J. Bus. Ethics 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. CFD simulation and experimental verification of the spatial and temporal distributions of
ҷараёни ҳавои поиншустаи як UAV чор-ротори кишоварзӣ дар ҳаво. Ҳисоб. Электрон. кишоварзӣ. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz´ alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, R.P., Goodin, D., Poland, J., 2016.
Истифодаи системаҳои ҳавопаймоии бесарнишин барои фенотипкунии баланди иқтидор дар боғҳои калони гандумпарварӣ. Усулҳои растанӣ 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Хакала, Т., Хонкаваара, Э., Саари, Х., Макинен, ¨ Ҷ., Кайвосожа, Ҷ., Песонен, Л., & Пол ¨ онен, ¨I., 2013. Тасвири спектралӣ аз UAV дар шароити гуногуни равшанӣ . Дар GG Bill R. (ред.), Архивҳои байналмилалии фотограмметрия, илмҳои дурдаст ва иттилооти фазоӣ — Archives ISPRS (ҷилд. 40, нашри 1W2, саҳ. 189–194). Ҷамъияти байналхалқии фотограмметрия ва зеҳни дур. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, S.M., Morris, R.H., Carvalho, R.C., Roder, N., Barlow, P., Mills, K., Wang, L.Evaluating techniques for mapping island vegetation from unmanned aerial
vehicle (UAV) images: Pixel classification, visual interpretation and machine learning approaches. Int. J. Appl. Earth Obs. Geoinf. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. Хоҷагии оқилона тавассути роҳбарии масъул дар Бангладеш: имкониятҳо, имкониятҳо ва берун аз он.
Sustainability 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. Мошинҳои хурди озмоишии фосилавӣ дар таҳқиқоти муҳити зист. Компаси география 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
Hardin, PJ, Jensen, RR, 2011. Мошинҳои ҳавоии миқёси хурди бесарнишин дар ташхиси фосилавии муҳити зист: мушкилот ва имкониятҳо. GISci. Сенсори дурдаст 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. Интернети ашёи кишоварзӣ: технологияҳо ва барномаҳо, (нашри 1. 2021). Спрингер.
Herwitz, S.R., Johnson, L.F., Dunagan, S.E., Higgins, R.G., Sullivan, D.V., Zheng, J., Lobitz, B.M., Leung, J.G., Gallmeyer, B.A., Aoyagi, M., Slye, R.E., Brass, J.A., 2004.
Imaging from an unmanned aerial vehicle: agricultural surveillance and decision support. Comput. Electron. Agric. 44 (1), 49–61. https://doi.org/10.1016/j.
compag.2004.02.006.
Holman, F.H., Riche, A.B., Michalski, A., Castle, M., Wooster, M.J., Hawkesford, M.J., High throughput field phenotyping of wheat plant height and growth rate in field plot trials using UAV based remote sensing. Remote Sensing 8 (12). https://doi. org/10.3390/rs8121031.
Хонкаваара, Э., Саари, Х., Кайвосожа, Ҷ., Пол ¨ онен, ¨ И., Хакала, Т., Литкей, П., М¨акинен, Ҷ., Песонен, Л., 2013. Коркард ва арзёбӣ тасвирҳои спектрометрӣ, стереоскопӣ, ки бо истифода аз камераи спектралии UAV сабук барои кишоварзии дақиқ ҷамъоварӣ шудаанд. Санҷиши дурдаст 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. Low-altitude unmanned aerial vehiclesbased internet of things services: comprehensive survey and future perspectives. IEEE Internet Things J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, G.S., Corke, P., Usher, K., Roberts, J., 2005. Combined optic-flow and stereo-based navigation of urban canyons for a UAV. In: 2005 IEEE/RSJ
International Conference on Intelligent Robots and Systems, pp. 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. A Creative IoT agriculture platform for cloud fog computing. Sustain. Comput. Inf. Syst. 28, 100285.
Хуанг, Х., Денг, Ҷ., Лан, Ю., Янг, А., Денг, X., Чжан, Л., Гонсалес-Андужар, JL, 2018. Шабакаи пурра конволютсионӣ барои харитаи алафҳои бегонаи ҳавопаймои бесарнишин ( UAV) тасвирҳо. PLoS ONE 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. Deep learning versus Object-based Image Analysis (OBIA) in weed mapping of UAV imagery. Int. J.
Remote Sens. 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. Deep color calibration for UAV imagery in crop monitoring
бо истифода аз интиқоли услуби семантикӣ бо таваҷҷӯҳи маҳаллӣ ба глобалӣ. Int. J. Appl. Оби Замин. Geoinf. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, Y.B., Thomson, S.J., Hoffmann, W.C., Lan, Y.B., Fritz, B.K., 2013. Development and prospect of unmanned aerial vehicle technologies for agricultural production
management. Int. J. Agric. Biol. Eng. 6 (3), 1–10. https://doi.org/10.3965/j. ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. Таҳияи системаи дорупошӣ барои платформаи ҳавопаймои бесарнишин. Appl. Eng. кишоварзӣ. 25 (6), 803–809.
Ҳант Ҷр., ER, Дин Ҳивли, В., Фуҷикава, СҶ, Линден, DS, Daughtry, CST, McCarty, GW, 2010. Гирифтани аксҳои рақамии NIR-сабз-кабуд аз
unmanned aircraft for crop monitoring. Remote Sensing 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. Satellite- and drone-based remote sensing of crops and soils for smart farming–a review. Soil Sci. Plant Nutr. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Ислом, Н., Рашид, ММ, Пасандиде, Ф., Рэй, Б., Мур, С., Кадел, Р., 2021. Баррасии барномаҳо ва технологияҳои коммуникатсионӣ барои Интернети ашё (IoT) ва
Unmanned Aerial Vehicle (UAV) based sustainable smart farming. Sustainability 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. Assessing the accuracy of high resolution digital surface models computed by
PhotoScan® and MicMac® in sub-optimal survey conditions. Remote Sensing 8 (6), https://doi.org/10.3390/rs8060465.
Jim´enez-Brenes, F.M., Lopez-Granados, ´ F., Castro, A.I., Torres-S´ anchez, J., Serrano, N., Pena, ˜ J.M., 2017. Quantifying pruning impacts on olive tree architecture and annual canopy growth by using UAV-based 3D modelling. Plant Methods 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens.
Environ. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. Системаи мониторинги маҳсулоти кишоварзӣ, ки аз ҷониби роёниши абрӣ дастгирӣ карда мешавад. Ҳисобкунии кластерӣ. 22 (4), 8929–8938.
Ju, C., & Son, H. I. 2018a. Performance evaluation of multiple UAV systems for remote sensing in agriculture. Proceedings of the Workshop on Robotic Vision and Action in Agriculture at the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–26.
Ju, C., Son, HI, 2018b. Системаҳои сершумори UAV барои барномаҳои кишоварзӣ: назорат, татбиқ ва арзёбӣ. Электроника 7 (9), 162. https://doi.org/10.3390/
electronics7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. The potential of remote sensing and artificial intelligence as tools to improve the
resilience of agriculture production systems. Curr. Opin. Biotechnol. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, M.L., Freeman, J.H., Raj, D., Da Silva, S., Eubanks, S., Wiggins, D.J., Lollar, M., Marois, J.J., Mellinger, H.C., Das, J., 2019. An improved crop scouting technique incorporating unmanned aerial vehicle–assisted multispectral crop imaging into conventional scouting practice for gummy stem blight in watermelon. Plant Dis. 103 (7), 1642–1650.
Kapoor, K.K., Tamilmani, K., Rana, N.P., Patil, P., Dwivedi, Y.K., Nerur, S., 2018. Advances in social media research: past, present and future. Inform. Syst. Front. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: vine disease detection network based on multispectral images and depth map. Remote Sensing 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. Comparison of satellite and UAV-based multispectral imagery for vineyard
арзёбии тағирёбанда. Ҳисси дурдаст 11 (4). https://doi.org/10.3390/rs11040436.
Khan, P.W., Byun, Y.-C., Park, N., 2020. IoT-blockchain enabled optimized provenance system for food industry 4.0 using advanced deep learning. Sensors 20 (10), 2990.
Khan, R.U., Khan, K., Albattah, W., Qamar, A.M., Ullah, F., 2021. Image-based detection of plant diseases: from classical machine learning to deep learning journey. Wireless Commun. Mobile Comput. 2021, 1–13.
Khan, S., Tufail, M., Khan, M.T., Khan, Z.A., Iqbal, J., Alam, M., Le, K.N.Q., 2021. A novel semi-supervised framework for UAV based crop/weed classification. PLoS ONE 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. Баррасии татбиқи ҷорӣ ва потенсиалии ҳассосияти гармидиҳӣ дар соҳаи кишоварзии дақиқ. Ҳисоб кардан. Электрон.
Agric. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. Evolution of Internet of Things (IoT) and its significant impact in the field of Precision Agriculture. Comput. Electron. Agric. 157, 218–231.
Ким, В., Хан, ГФ, Вуд, Ҷ., Маҳмуд, МТ, 2016. Ҷалби кормандон барои созмонҳои устувор: таҳлили калимаҳои калидӣ бо истифода аз таҳлили шабакаҳои иҷтимоӣ ва таркиш
равиши ошкор. Устуворӣ 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. Integration of terrestrial and drone-borne
hyperspectral and photogrammetric sensing methods for exploration mapping and mining monitoring. Remote Sensing 10 (9), 1366. https://doi.org/10.3390/
rs10091366.
Китано, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. Ҳисобкунии растаниҳои ҷуворимакка бо истифода аз омӯзиши амиқ ва тасвирҳои UAV. IEEE Geosci. Сенсори дурдаст Летт. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. Омӯзиши автоматии мошинсозӣ барои фенотипсозии растанӣ дар асоси тасвири баландсуръат. Ҳисси дурдаст 13 (5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, I.V., Voroshilova, A.A., 2020. Modern technological trends in the development of the ecosystem of cargo UAVs. J. Phys. Conf. Ser. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. Visual SLAM for indoor livestock and farming using a small drone with a monocular camera: a feasibility study.
Drones 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie´c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. Survey of drones for agriculture automation from planting to
дарав. Дар: INES 2018 – Конфронси байналмилалии IEEE 22 оид ба системаҳои муҳандисии интеллектуалӣ, саҳ. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT framework views and challenges: towards protecting drones as “Things”. Sensors 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. Тартиби коркард ва таснифоти тасвирҳо барои таҳлили тасвирҳои зердесиметрӣ, ки бо ҳавопаймои бесарнишин дар болои хушкӣ гирифта шудаанд
чарогоҳҳо. GISci. Сенсори дурдаст 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, A.S., Rango, A., Herrick, J.E., 2007. Unmanned aerial vehicles for rangeland mapping and monitoring: a comparison of two systems. ASPRS Annual Conference Proceedings.
Лам, OHY, Доготари, М., Прум, М., Витлани, ХН, Роерс, С., Мелвилл, Б., Зиммер, Ф., Беккер, Р., 2021. Ҷараёни кории кушодаасос барои харитаи алафҳои бегона дар алафҳои бегона
истифодаи ҳавопаймои бесарнишин: Истифодаи Rumex obtusifolius ҳамчун омӯзиши мисол. Ёвро. J. Sens дурдаст 54 (суп1), 71-88. https://doi.org/10.1080/22797254.2020.1793687.
Ламберт, ДМ, Лоуенберг-ДеБоер, Ҷ., Гриффин, Т.В., Пеоне, Ҷ., Пэйн, Т., Даберков, СГ, 2004. Қабули, даромаднокӣ ва истифодаи беҳтари маълумоти дақиқи кишоварзӣ.
Варақаи корӣ. Донишгоҳи Purdue. https://doi.org/10.22004/ag.econ.28615.
Lelong, C.C.D., Burger, P., Jubelin, G., Roux, B., Labb´e, S., Baret, F., 2008. Assessment of unmanned aerial vehicles imagery for quantitative monitoring of wheat crop in small plots. Sensors 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
Li, C., Niu, B., 2020. Design of smart agriculture based on big data and Internet of things. Int. J. Distrib. Sens. Netw. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. Remote estimation of canopy height and aboveground biomass of maize using high-resolution stereo images from a low-cost unmanned aerial vehicle system. Ecol. Ind. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, K.G., Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. Machine learning in agriculture: a review. Sensors 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. Remote, aerial phenotyping of maize traits with a mobile multi-sensor approach. Plant Methods 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Лин, З., Гуо, В., 2020. Муайян кардан ва ҳисоб кардани паникули сорго бо истифода аз тасвирҳои системаи ҳавоии бесарнишин ва омӯзиши амиқ. Пеш. Илмҳои растанӣ. 11.
Лю, С., Гуо, Л., Вебб, Х., Я, X., Чанг, X., 2019. Системаи мониторинги интернети ашёи экологии муосир дар асоси роёниши абрӣ. IEEE Access 7, 37050–37058.
Lopez-Granados, ´ F., 2011. Weed detection for site-specific weed management: mapping and real-time approaches. Weed Res. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Лопес-Гранадос, Ф., Торрес-Санчес, Й., Де Кастро, А.-И., Серрано-Перес, А., МесасКарраскоса, Ф.-Ж., Пена, ˜ Й.-М. , 2016. Мониторинги бармаҳал дар асоси объекти алафҳои алаф дар зироати алаф бо истифода аз тасвирҳои UAV-и баландсифат. Агрон. Устувор. Dev. 36 (4), 1–12
Лопес-Гранадос, Ф., Торрес-Санчес, Ҷ., Серрано-Перес, А., де Кастро, А.И., МесасКарраскоса, Ф.-Ҷ., Пена, ˜ J.-M., 2016. Харитаи алафҳои бегона дар мавсими барвақт дар офтобпараст бо истифода аз технологияи UAV: тағирёбии харитаҳои коркарди гербисидҳо бар зидди ҳадди алафҳои бегона. дақиқ. кишоварзӣ. 17 (2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – imaging spectroscopy from a multirotor unmanned aircraft system. J. Field Rob. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. Сканкунии лазерии заминӣ зироатхои хочагии кишлок. Дар JJ
Chen J. Maas H–G. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 37, pp. 563–566).
Ҷамъияти байналхалқии фотограмметрия ва зеҳни дур. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. A review of supervised objectbased land-cover image classification. ISPRS J. Photogramm. Remote Sens. 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, W.H., Steppe, K., 2019. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017.
Системаи ҳавоии бесарнишин (UAS) дар асоси фенотипсозии лӯбиё бо истифода аз омезиши маълумотҳои сенсорӣ ва мошини омӯзиши шадид. ISPRS J. Фотограмма. Сенсори дурдаст 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Маймаитицзян, М., Саган, В., Сидике, П., Далое, А.М., Эркбол, Х., Фрицчи, ФБ, 2020.
Crop monitoring using satellite/UAV data fusion and machine learning. Remote Sensing 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Манфреда, С., Маккейб, М., Миллер, П., Лукас, Р., Пажуэло Мадригал, В., Маллинис, Г., Бен Дор, Э., Хелман, Д., Эстес, Л., Сираоло, Г. ., Мюллерова, ´ Ж., Тауро, Ф., де Лима, М., де
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P´erez, G., Su, Z., Vico, G., Toth, B., 2018. On the use of unmanned aerial systems for
мониторинги муҳити зист. Ҳисси дурдаст 10 (4), 641.
Маринко, РА, 1998. Иқтибосҳо ба маҷаллаҳои омӯзиши занон дар рисолаҳо, 1989 ва The Serials Librarian 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. Resource management in UAV-assisted wireless networks: an optimization perspective. Ad Hoc Netw. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. Барномаҳои амалии платформаи бисёрсенсории UAV дар асоси тасвирҳои баландсифати бисёрспектралӣ, гармӣ ва RGB дар дақиқ
viticulture. Agriculture 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. Ғайр аз шохиси анъанавии NDVI ҳамчун омили калидӣ барои паҳн кардани истифодаи UAV дар токпарварии дақиқ. Илм. Намояндагии 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Матезе, А., Тоскано, П., Ди Женнаро, СФ, Генесио, Л., Ваккари, ФП, Примицерио, Ҷ., Белли, С., Залдей, А., Бианкони, Р., Гиоли, Б., 2015 Муқоисаи байни ҳавопаймоҳо, ҳавопаймоҳо
and satellite remote sensing platforms for precision viticulture. Remote Sensing 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV ва омӯзиши мошинсозӣ дар асоси такмил додани индекси растаниҳои аз моҳвора асосёфта барои дақиқ
хочагии кишлок. Сенсорҳо 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, K.W., 1990. Mapping authors in intellectual space: a technical overview. J. Am. Soc. Info. Sci. 41 (6), 433–443.
Meinen, B.U., Robinson, D.T., 2021. Agricultural erosion modelling: evaluating USLE and WEPP field-scale erosion estimates using UAV time-series data. Environ. Modell. Software 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. Classification of lowland native grassland communities using hyperspectral Unmanned Aircraft System (UAS) Imagery in the
Tasmanian midlands. Drones 3 (1), 5.
Мессина, Г., Модика, Г., 2020. Истифодаи тасвирҳои гармидиҳии UAV дар соҳаи кишоварзии дақиқ: ҳолати санъат ва дурнамои таҳқиқоти оянда. Ҳисси дурдаст 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. A bibliographic study on big data: concepts, trends and challenges. Business Process Manag. J. 23 (3),
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. Crop improvement using life cycle datasets acquired under field conditions. Front. Plant Sci. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, B.B.V.L., 2018. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 133, 502–509.
Мохарана, С., Дутта, С., 2016. Тағйирёбии фазоии хлорофилл ва миқдори нитрогени биринҷ аз тасвирҳои гиперспекталӣ. ISPRS J. Фотограмма. Санҷиши дурдаст 122, 17–29.
Муангпратхуб, Ҷ., Буннам, Н., Кажорнкасират, С., Лекбангпонг, Н., Ваничсомбат, А.
Nillaor, P., 2019. IoT and agriculture data analysis for smart farm. Comput. Electron. Agric. 156, 467–474.
Нансен, C., Эллиотт, Н., 2016. Ҳисси дурдаст ва профили инъикос дар энтомология. Анну. Ваҳй Энтомол. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Multispectral mapping in agriculture: terrain mosaic using an autonomous quadcopter UAV. Int. Conf.
Unmanned Aircraft Syst. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. Интернети ашёи бесарнишин (Iodt): пешбинии ояндаи дронҳои интеллектуалӣ. Adv. Intell. Сист. Ҳисоб кардан. 1045, 563-580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. A light-weight multispectral sensor for micro UAV—opportunities for very high resolution airborne remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 37 (B1), 1193–1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. Emerging UAV applications in agriculture. In: 2019 7th International Conference on Robot Intelligence Technology and
Applications (RiTA), pp. 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
Nerur, S.P., Rasheed, A.A., Natarajan, V., 2008. The intellectual structure of the strategic management field: an author co-citation analysis. Strateg. Manag. J. 29 (3),
319-336.
Neupane, K., Baysal-Gurel, F., 2021. Муайянкунии худкор ва мониторинги бемориҳои растанӣ бо истифода аз ҳавопаймоҳои бесарнишин: барраси. Санҷиши дурдаст 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV барои барномаҳои харитасозии 3D: баррасии. Appl. Геоматика 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Ниу, Х., Холленбек, Д., Чжао, Т., Ванг, Д., Чен, Ю., 2020. Баҳодиҳии бухоршавӣ бо UAV-ҳои хурд дар соҳаи кишоварзии дақиқ. Сенсорҳо 20 (22), 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometrics, Citation Analysis and Co-Citation Analysis. A Review of Literature I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, сенсорҳо ва коркарди маълумот дар агроҷангал: баррасии татбиқи амалӣ. Int. J. Сенси дурдаст 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, U.S., Pratihast, A.K., Aryal, J., Kayastha, R.B., 2020. A review on drone-based data solutions for cereal crops. Drones 4 (3), 1–29. https://doi.org/10.3390/
ҳавопаймоҳои бесарнишин4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. Estimating oil and protein content of sesame seeds using image processing and artificial neural network. J. Am. Oil
Сок.и химикхо. 97 (7), 691–702.
Пена, ˜ JM, Торрес-Санчес, Ҷ., де Кастро, АИ, Келли, М., Лопес-Гранадос, ´ Ф., Суарес, О., Харитаи алафҳои бегона дар майдонҳои ҷуворимакка бо истифода аз таҳлили объективӣ аз
Тасвирҳои ҳавопаймои бесарнишин (UAV). PLoS ONE 8 (10), e77151.
Перес-Ортис, М., Пена, ˜ JM, Гутиеррес, ПА, Торрес-Санчес, Й., Херв ас-Мартинес, К.,
Lopez-Granados, ´ F., 2015. A semi-supervised system for weed mapping in sunflower crops using unmanned aerial vehicles and a crop row detection method. Appl. Soft Comput. J. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, S.S., 2021. Cost-effective IoT devices as trustworthy data sources for a blockchain-based water management system in precision agriculture. Comput. Electron. Agric. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. Advanced UAV–WSN system for intelligent monitoring in precision agriculture. Sensors 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, S.L., 2020. Blockchain applications in supply chains, transport and logistics: a systematic review of the literature. Int. J. Prod. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, S.F., Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, F.P., 2012. A flexible unmanned aerial vehicle for precision agriculture.
дақиқ. кишоварзӣ. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Притчард, А., 1969. Библиографияи оморӣ ё библиометрия. J. Ҳуҷҷат. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. The suitability of an unmanned aerial vehicle (UAV) for the evaluation of experimental fields and crops. Agriculture 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017. Дронҳои кишоварзӣ: як пешрафти муосир дар соҳаи кишоварзии дақиқ. Ҷ. Статис. идора. Сист. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. A compilation of UAV applications for precision agriculture. Comput. Netw. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. Татбиқи таҳлили маълумоти калон ва зеҳни сунъӣ дар тадқиқоти агрономӣ. Ҳиндустон Ҷ. Агрон. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. A bibliometric analysis on the use of unmanned aerial vehicles in agricultural and forestry studies. Int. J. Remote Sens. 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
Расмуссен, Ҷ., Нилсен, Ҷ., Гарсиа-Руиз, Ф., Кристенсен, С., Стрейбиг, ҶК, Лотц, Б., 2013.
Potential uses of small unmanned aircraft systems (UAS) in weed research. Weed Res. 53 (4), 242–248.
Расмуссен, Ҷ., Нтакос, Г., Нилсен, Ҷ., Свенсгаард, Ҷ., Поулсен, РН, Кристенсен, С., Оё нишондиҳандаҳои растанӣ аз камераҳои сатҳи истеъмолӣ ба даст оварда шудаанд.
Оё ҳавопаймоҳои бесарнишин барои арзёбии қитъаҳои таҷрибавӣ ба қадри кофӣ эътимодноканд? Ёвро. J. Агрон. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. Digitalization in food supply chains: a bibliometric review and key-route main path
analysis. Sustainability 14 (1), 83. https://doi.org/10.3390/su14010083.
Режеб, А., Режеб, К., Симске, С.Ж., Трейблмайер, Х., 2021а. Дронҳо барои идоракунии занҷираи таъминот ва логистика: рӯзномаи баррасӣ ва тадқиқот. Int. J. Логист. Рес. Appl.
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Режеб, А., Режеб, К., Симске, С., Трейблмайер, Х., 2021б. Технологияҳои блокчейн дар логистика ва идоракунии занҷираи таъминот: баррасии библиометрӣ. Логистика 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. Humanitarian drones: a review and research agenda. Internet of Things 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. Blockchain research in healthcare: a bibliometric review and current research trends. J. of Data, Inf. and
Manag. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. Тадқиқоти Интернети чизҳо дар идоракунии занҷираи таъминот ва логистика: таҳлили библиометрӣ. интернет
аз чизҳои 12, 100318.
ReportLinker, 2021. Бозори ҷаҳонии дронҳои кишоварзӣ то сол ба 15.2 миллиард доллар мерасад. GlobeNewswire. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- Сол-2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, J.F., Ballesteros, R., Poblete, T.,Moreno, M.A., 2017. Uncooled thermal camera calibration and optimization of the
раванди фотограмметрия барои татбиқи UAV дар кишоварзӣ. Датчикҳо (Швейтсария) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, M.A., Pizam, A., 2015. Advances in hospitality research: “From Rodney Dangerfield to Aretha Franklin”. Int. J. Contempor. Hospital. Manag. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Ролдан, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. Системаи сенсории мини-UAV барои андозагирии тағирёбандаҳои муҳити зист дар гармхонаҳо. Сенсорҳо 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Розенберг, Г., Кент, Р., Бланк, Л., 2021. UAV дараҷаи истеъмолӣ барои ошкор ва таҳлили шакли тақсимоти фазоии алафҳои бегона дар майдонҳои пиёзи тиҷоратӣ истифода мешавад. дақиқ. кишоварзӣ. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Саари, Х., Пелликка, И., Песонен, Л., Туоминен, С., Хейкила, ¨ Ҷ., Холмлунд, С., Макинен, ¨ Ҷ., Ожала, К., Антила, Т., 2011. Бесафар мошини ҳавоӣ (UAV) системаи камераи спектралӣ барои барномаҳои ҷангал ва кишоварзӣ. Давом диҳед. SPIE - Int. Соц. Опти Eng. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, A. K., Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, S. P., & Saha, H. N., IOT-based drone for improvement of crop quality in agricultural field. In S. H.
Н. Чакрабарти С. (Эд.), 2018 IEEE 8-уми Семинар ва Конфронси солонаи ҳисоббарорӣ ва коммуникатсия, CCWC 2018 (ҷилдҳо. 2018-январ, саҳ. 612–615). Институт
of Electrical and Electronics Engineers Inc. doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, K.V., Vara Prasad, Y.R., Dubey, S.R., Venkataraman, H., 2019. LEDCOM: a novel and efficient LED based communication for precision agriculture. IEEE Conf. Info. Commun. Technol. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E., Barrado, C., Pastor, E., 2014. Таҷрибаҳои парвози UAV барои зеҳни дури минтақаҳои растаниҳо истифода мешаванд. Санҷиши дурдаст 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Санкаран, С., Хот, LR, Эспиноза, CZ, Яролмасҷед, С., Сатхувалли, VR, Вандемарк, GJ, Миклас, PN, Картер, AH, Памфри, MO, Ноулз, NRN, Pavek, MJ, 2015.
Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: a review. Eur. J. Agron. 70, 112–123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. Тасвирҳои гармидиҳии баландсифати UAV барои ҳисоб кардани
тағйирёбии фаврӣ ва мавсимии ҳолати оби растанӣ дар дохили токзор. кишоварзӣ. Идораи об. 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, C.C., Dubinsky, E.K., Holmes, K.L., 2010. Beyond citation analysis: A model for assessment of research impact. J. Med. Library Assoc. : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. Спектроскопияи тасвирии марбут ба системаи заминӣ-арзёбӣ. Муҳити сенсори дурдаст. 113, S123-S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. Monitoring agronomic parameters of winter wheat crops with low-cost UAV
imagery. Remote Sensing 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, D.G., Dingus, B.R., Reinholtz, C., 2008. Development and application of an autonomous unmanned aerial vehicle for precise aerobiological sampling above
agricultural fields. J. Field Rob. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Шадрин, Д., Менщиков, А., Сомов, А., Борнеман, Г., Хауслаге, Я., Федоров, М.
Имконияти кишоварзии дақиқ тавассути ҳассосияти дохилӣ бо зеҳни сунъӣ. IEEE Транс. Асбоб. Меъёр. 69 (7), 4103–4113.
Shakhatreh, H., Sawalmeh, A.H., Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Мошинҳои бесарнишин (UAVs): пурсиш оид ба барномаҳои шаҳрвандӣ ва мушкилоти асосии тадқиқот. Дастрасии IEEE 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, T.C., 2019. Big data driven agriculture: big data analytics in plant breeding, genomics, and the use of remote sensing
technologies to advance crop productivity. Plant Phenome J. 2 (1), 1–8.
Sharma, B.K., Chandra, G., Mishra, V.P., 2019. Comparitive Analysis and Implication of UAV and AI in Forensic Investigations. In: Proceedings – 2019 Amity International
Conference on Artificial Intelligence. https://doi.org/10.1109/AICAI.2019.8701407.
Шарма, Р., Шишодия, А., Гунасекаран, А., Мин, Х., Муним, ЗХ, 2022. Нақши зеҳни сунъӣ дар идоракунии занҷираи таъминот: харитасозии қаламрав. Int. Ҷ.
Prod. Res. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, J.A., Murray, S.C., Pugh, N.A., Rooney, W.L., Shafian, S., Rajan, N., Rouze, G., Morgan, C.L.S., Neely, H.L., Rana, A., Bagavathiannan, M.V.,
Ҳенриксон, Ҷ., Боуден, Э., Валасек, Ҷ., Олсенхоллер, Ҷ., Бишоп, депутат, Шеридан, Р., Путман, ЭБ, Попеску, С., Беркс, Т., Коп, Д., Иброҳим, А., Маккатчен, БФ,
Baltensperger, D.D., Avant, R.V., Vidrine, M., Yang, C., Zhang, J., 2016. Unmanned aerial vehicles for high-throughput phenotyping and agronomic research. PLoS ONE
11 (7), e0159781.
Shuai, G., Martinez-Feria, R.A., Zhang, J., Li, S., Price, R., Basso, B., 2019. Capturing maize stand heterogeneity across yield-stability zones using Unmanned Aerial
Vehicles (UAV). Sensors 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Иқтибосҳои муштарак дар адабиёти илмӣ: ченаки нави муносибати байни ду ҳуҷҷат. J. Ам. Соц. Маълумот. Илм. 24 (4), 265–269.
Small, H., Rorvig, M.E., Lunin, L.F., 1999. Visualizing science by citation mapping. J. Am. Soc. Info. Sci. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonsalves, RA, Campello, RJGB, 2021. Ҳисоб кардани чорво дар ваҳшӣ бо тасвирҳои ҳавоии геолокатсияшуда дар минтақаҳои калони чарогоҳ. Ҳисоб кардан. Электрон. кишоварзӣ. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, P.C., Sharma, J.K., 2020. An approach for route optimization in applications of precision agriculture using UAVs. Drones 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Стаффорд, КМ, 2000. Татбиқи кишоварзии дақиқ дар асри 21. Ҷ. Агрик. Eng. Рес. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. Арзёбии хушксолии гандум тавассути тасвирҳои дурдаст бо истифода аз ҳавопаймои бесарнишин. Дар 2018 Конфронси 37-уми назорати Чин (CCC).
Су, Ҷ., Лю, С., Кумбс, М., Ху, X., Ванг, С., Сю, X., Ли, К., Гуо, Л., Чен, В.-Х., 2018. Мониторинги занги зарди гандум тавассути омӯхтани тасвирҳои бисёрспектрии ҳавоии UAV.
Comput. Electron. Agric. 155, 157–166. https://doi.org/10.1016/j. compag.2018.10.017.
Su, Y., Wang, X., 2021. Innovation of agricultural economic management in the process of constructing smart agriculture by big data. Sustainable Comput. Inf. Syst. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, D.G., Fulton, J.P., Shaw, J.N., Bland, G.L., 2007. Evaluating the sensitivity of an unmanned thermal infrared aerial system to detect water stress in a cotton canopy. Trans. ASABE 50 (6), 1955–1962.
Sumesh, K.C., Ninsawat, S., Som-ard, J., 2021. Integration of RGB-based vegetation index, crop surface model and object-based image analysis approach for sugarcane yield estimation using unmanned aerial vehicle. Comput. Electron. Agric. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. Системаи харитасозии гиперспектралии сабук барои
самолётхои бесарнишин — натичахои аввалин. Дар: 2013 Семинари 5-ум оид ба тасвири гиперспекталӣ ва коркарди сигнал: Эволютсия дар ҳисси дурдаст (WHISPERS), саҳ. 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
Суомалайнен, Ҷ., Андерс, Н., Иқбол, С., Реринк, Г., Франке, Ҷ., Вентинг, П., Хуннигер, Д., Барфоломей, Х., Беккер, Р., Кооистра, Л. 2014. Гиперспектрали сабук
системаи харитасозӣ ва занҷири коркарди фотограмметрӣ барои ҳавопаймоҳои бесарнишин. Санҷиши дурдаст 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, I.H., Alam, M.M., Illahi, U., Su’ud, M.M., 2021. Advance control strategies using image processing, UAV and AI in agriculture: A review. World J. Eng. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. Коркарди иттилоот бо истифода аз иқтибосҳо барои таҳқиқи таъсири журнал дар баҳисобгирӣ. Инф. Раванд. Идора кардан. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. Тадқиқот дар бораи шабакаи 5G ва таъсири он ба кишоварзӣ: мушкилот ва имкониятҳо. Ҳисоб кардан.
Electron. Agric. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. Қабули қарорҳои ба маълумот асосёфта дар соҳаи кишоварзии дақиқ: болоравии маълумоти калон дар системаҳои кишоварзӣ. Ҷ. Агрик. Маълумоти озуқаворӣ.
20 (4), 344-380.
Тао, Х., Фенг, Х., Сю, Л., Миао, М., Янг, Г., Янг, X., Фан, Л., 2020. Баҳодиҳии ҳосил ва баландии растании гандуми тирамоҳӣ бо истифода аз UAV- тасвирҳои гиперспекталӣ дар асоси.
Датчикҳо 20 (4), 1231.
Techy, L., Schmale III, D.G., Woolsey, C.A., 2010. Coordinated aerobiological sampling of a plant pathogen in the lower atmosphere using two autonomous unmanned aerial vehicles. J. Field Rob. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, E.C., Machado, B.B., Astolfi, G., Belete, N.A.d.S., Amorim, W.P., Roel, A.R., Pistori, H., 2020. Detection and classification of soybean pests using deep learning
бо тасвирҳои UAV. Ҳисоб кардан. Электрон. кишоварзӣ. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. Истифодаи Uas барои арзёбии системаҳои кишоварзӣ дар AN ботлоқзор дар Танзания дар - Ва WetSeason барои кишоварзии устувор ва таъмини ҳақиқати замина барои маълумотҳои Terra-Sar X. Дар: ISPRS – Архивҳои байналмилалии фотограмметрия, илмҳои фосилавӣ ва иттилооти фазоӣ, саҳ. 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M., 2008. Библиометрия ба вебометрика. J. Маълумот. Илм. 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ J.M., 2015. An automatic object-based method for optimal thresholding in UAV images: application for vegetation detection in herbaceous crops. Comput. Electron. Agric. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ J.M., Hassan, Q. K., 2015. High-throughput 3-D monitoring of agricultural-tree plantations with Unmanned Aerial Vehicle (UAV) technology. PLoS ONE 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ J.M., de Castro, A.I., Lopez-Granados, ´ F., 2014. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Comput. Electron. Agric. 103, 104–113. https://doi.org/10.1016/j. compag.2014.02.009.
Tsouros, D.C., Bibi, S., Sarigiannidis, P.G., 2019. A review on UAV-based applications for precision agriculture. Information (Switzerland) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. Оптимизатсияи банақшагирии парвози бесарнишин барои андозагирии сохтори зироатҳои боғдорӣ. ISPRS J. Фотограмма.
Сенсори дурдаст 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsulas, N., Bartzanas, T., Kittas, C., 2017. Интернети чизҳо дар соҳаи кишоварзӣ, пешрафтҳои охирин ва мушкилоти оянда. Биосист. Eng. 164, 31-48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Уддин, А., Сингх, ВК, Пинто, Д., Олмос, И., 2015. Харитасозии илмии тадқиқоти илми компютерӣ дар Мексика. Scientometrics 105 (1), 97–114.
UN., 2019. World population prospects 2019. https://population.un.org/wpp/ (Accessed on 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. Тавсифи заминҳои шолӣ аз ҷониби системаи санҷандаҳои гиперспектралии миниётураи UAVmounted. IEEE Ҷ. Сел. боло. Appl. Оби Замин.
Сенсори дурдаст 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. Ван дер Мерве, Д., Бурчфилд, ДР, Витт, ТД, Нарх, KP, Шарда, А., 2020. Дронҳо дар
agriculture. Adv. Agron. 162, 1–30.
Велусами, П., Раджендран, С., Махендран, РК, Носир, С., Шафиқ, М., Чой, Ҷ.-Г., 2022.
Unmanned Aerial Vehicles (UAV) in precision agriculture: applications and challenges. Energies 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, M.F., Belluscio, A., Ardizzone, G., 2018. Mapping and classification of ecologically sensitive marine habitats using Unmanned Aerial
Vehicle (UAV) imagery and Object-Based Image Analysis (OBIA). Remote Sensing 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. Индекси майдони сабз аз системаи ҳавопаймоии бесарнишин аз болои гандум ва зироатҳои рапс . Муҳити сенсори дурдаст. 152, 654-664. https://doi.org/10.1016/j.rse.2014.06.006.
Фон Буерен, СК, Буркарт, А., Хуени, А., Рашер, У., Туохи, МП, Юле, ИЖ, 2015. Ҷойгир кардани чор сенсорҳои оптикии UAV дар болои алафзор: мушкилот ва
маҳдудиятҳо. Biogeosciences 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. Интернети чизҳои зеризаминӣ дар соҳаи кишоварзии дақиқ: ҷанбаҳои меъморӣ ва технология. Шабакаи Ad Hoc. 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. Зеҳни сунъии масъул ҳамчун ҷузъи махфии саломатии рақамӣ: таҳлили библиометрӣ, фаҳмишҳо ва самтҳои тадқиқот.
Info. Syst. Front. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. Bibliometric analysis of remote sensing research trend in crop growth monitoring: A case study in China. Remote Sensing 11 (7). https://doi.org/10.3390/rs11070809.
White, H.D., Griffith, B.C., 1981. Author cocitation: A literature measure of intellectual structure. J. Am. Soc. Info. Sci. 32 (3), 163–171.
Xiang, H., Tian, L., 2011. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. A review on plant high-throughput phenotyping traits using UAVbased sensors. Comput. Electron. Agric. 178, 105731 https://doi.org/10.1016/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. Unmanned aerial vehicle for remote sensing applications—a review. Remote Sensing 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. Moving people tracking and false track removing with infrared thermal imaging by a multirotor. Drones 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. Муқоисаи баҳодиҳии параметрҳои зироат бо истифода аз тасвирҳо аз УАВ-хо монтажшуда
snapshot hyperspectral sensor and high-definition digital camera. Remote Sensing 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. Estimation of winter wheat above-ground biomass using unmanned aerial vehicle-based snapshot
hyperspectral sensor and crop height improved models. Remote Sensing 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, R.A., Dandois, J.P., Holl, K.D., Nadwodny, D., Reid, J.L., Ellis, E.C., 2015. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biol.
Консерв. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. Замора-Изкиердо, МА, Санта, Ҷ., Мартинес, Ҷ.А., Мартинес, В., Скармета, AF, 2019.
Smart farming IoT platform based on edge and cloud computing. Biosyst. Eng. 177,
4-17.
Зарко-Тежада, Пи Ҷей, Диас-Варела, Р., Ангилери, В., Лоуджани, П., 2014. Миқдори баландии дарахт бо истифода аз тасвирҳои қатъии хеле баланд, ки аз ҳавопаймои бесарнишин гирифта шудааст
vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, W.A., McGee, R.J., Vandemark, G.J., Davis, J.B., Brown, J., Hulbert, S. H., Sankaran, S., 2020. Image-based phenotyping of flowering intensity in coolseason crops. Sensors 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, J.M., 2012. The application of small unmanned aerial systems for precision agriculture: a review. Precis. Agric. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Чжан, Л., Чжан, Х., Ниу, Ю., Хан, В., 2019. Харитасозии фишори оби ҷуворимакка дар асоси ҳассоси дурдасти бисёрҷанбаи UAV. Ҳисси дурдаст 11 (6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih, T., 2019. A deep learning-based approach for automated yellow rust
ошкор кардани беморӣ аз тасвирҳои баландсифати гиперспектралии UAV. Андозаи дурдаст 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. Ошкор ва табъизи беморӣ ва фишори ҳашароти растаниҳои чой бо истифода аз тасвири гиперспекталӣ дар якҷоягӣ бо таҳлили мавҷ. Ҳисоб кардан. Электрон. кишоварзӣ. 193, 106717 https://doi.org/10.1016/j. compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Entropy guided adversarial domain adaptation for aerial image semantic segmentation. IEEE Trans. G
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. Муайян кардани фенологияи биринҷ тавассути таҳлили силсилаи вақтҳои спектрии заминӣ маълумоти индекс. зироатхои сахрой рес. 198, 131-139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. Design of a precision agriculture leakage seeding system based on wireless sensors. Int. J. Online Eng. 14 (05), 184.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. Analysis of plant height changes of lodged maize using UAV-LiDAR data. Agriculture 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Чжоу, С., Чай, X., Янг, З., Ванг, Х., Янг, С., Сан, Т., 2021. Ҷуворимакка-IAS: Нармафзори таҳлили тасвири ҷуворимакка бо истифода аз омӯзиши амиқ барои фенотипсозии баланди ҳосилхезии растанӣ . Усулҳои растанӣ 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. Пешгӯии ҳосили ғалла дар биринҷ бо истифода аз растаниҳои бисёрвақтӣ
индексҳо аз тасвирҳои бисёрспектралӣ ва рақамӣ дар асоси UAV. ISPRS J. Фотограмма. Сенсори дурдаст 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. Моделсозии технологияи асосии системаи мониторинги гармхонаҳо дар асоси шабакаи сенсории бесим. Int. J. Online Eng. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, E.M.T., 2021. Assessment for crop water stress with infrared thermal imagery in precision agriculture: a review
ва дурнамои ояндаи барномаҳои омӯзиши амиқ. Ҳисоб. Электрон. кишоварзӣ. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}